


 当前位置:
当前位置:轮式机器人的制作
[10-10 20:36:41] 来源:http://www.88dzw.com 电子制作 阅读:8383次
文章摘要: 控制板是由较简单的单片机系统加直流电机构成的控制电路。如果需要完成某些“任务”还要增加传感器控制单元。 在家庭环境下可以用一台玩具小车的底盘改装,如果条件允许,可以参考图4简便的结构自制。材料采用3mm厚的有机玻璃。 A.减速直流小电机是用舵机去掉控制电路,并切去输出轴的限位杆。 B.车轮用6mm厚的有机玻璃,切割成直径60mm的圆形,外框橡胶圈用录音机的传动皮带套上,并用双面胶纸粘好。 C.底盘支架采用20mm长度的六角铜柱。 D.转向辅助小轮用录音机上的压带轮。 传感器是个独立的元件,其种类繁多。这里向大家介绍一款价格便宜,容易找到的“红外线
轮式机器人的制作,标签:电子小制作,http://www.88dzw.com
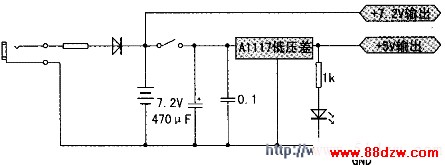
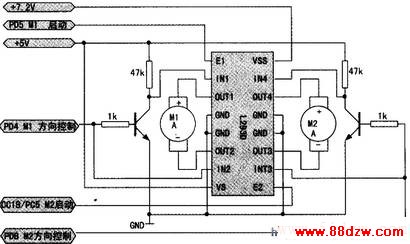
控制板是由较简单的单片机系统加直流电机构成的控制电路。如果需要完成某些“任务”还要增加传感器控制单元。
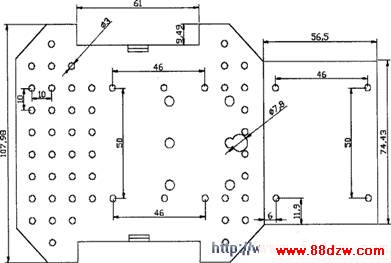
在家庭环境下可以用一台玩具小车的底盘改装,如果条件允许,可以参考图4简便的结构自制。材料采用3mm厚的有机玻璃。
A.减速直流小电机是用舵机去掉控制电路,并切去输出轴的限位杆。
B.车轮用6mm厚的有机玻璃,切割成直径60mm的圆形,外框橡胶圈用录音机的传动皮带套上,并用双面胶纸粘好。
C.底盘支架采用20mm长度的六角铜柱。
D.转向辅助小轮用录音机上的压带轮。
传感器是个独立的元件,其种类繁多。这里向大家介绍一款价格便宜,容易找到的“红外线接收模块”,也就是我们电视机、空调上的遥控接收组件。
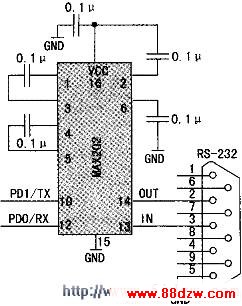
下面是以CodeVisionAVR为编译器写的C语言示范程序。该程序通过PA.7口输出脉冲并让红外线发射二极管输出红外线投射信号。单片机12腿(INTO/PD2)接上红外线接收组件,使得可以接收前面阻挡物所反射回来的红外线脉冲。程序如下:
#include<mega8515.h>
unsigned char i:
unsigned char speed_R=255,
speed_L=255;//小车速度0-255
bit key;
bit key_l:
bit key_2;
bit key_s;
//38kHz红外线载波脉冲
interrupt【TIMO_OVF】void timerO_oVf_isr
(void)
{
//TCNTO=OXA8是38kHz,的红外线载波
//并通过PA.7口输出方波
TCNTO=OxA8;
PORTA.7=((!PORTA.7)&key);
)
//红外线调制脉冲
interrupt[TIMl_OVF】void timerl_oVf_isr
(void) ・
(
TCNTl H=OxFF;
TCNT lL=Ox00; //大约产生2MS的脉冲
1++:
if(i<20)key=!key: //产生脉冲间隔
else{key=0;if(i>50)i=O;}
}
void main(void)
{
unsigned int j,n:
unsigned char s_L,s_R,k:
PORTA=0x00;DDRA=Obl0000000;
PORTB=0x00;DDRB=Ox00;
PORTC=0x00;DDRC=Obl0100011:
PORTD=0x00;DDRD=Obl1110000;
//CLOCk source:System Clock
//Clock value:8000.000 kHz
TCCR0=0x01: TCNTO=Ox00:
TCCRlA=0x00;TCCRl B=Ox03;
TCNTlH=0x00;TCNTlL=0x00;
OCRlAH=0x00;OCRlAL=0x00;
OCRlBH=0x00;OCRlBL=0x00;
TlMSK=0x82;
ACSR=Ox80;
#asm(“sei“)
PORTD.5=1:PORTD 7=1://打开两台电机的使能端
- 上一篇:远距离摇控改变电话呼叫转移地点