


 当前位置:
当前位置:基于虚拟现实的网络化上肢康复训练系统
[09-14 01:18:46] 来源:http://www.88dzw.com 电子制作 阅读:8595次
文章摘要:2.1配合阻抗训练模式的虚拟现实辅助训练软件设计 2.1.1 阻抗训练模式介绍 该训练模式适用于即将康复的患者,这类患者的患肢已经逐步恢复运动能力,这时就可以根据患者的康复情况,在康复锻炼过程中通过机器人给患者的患肢作用一定大小的阻尼力,使患者完成动作的时候克服阻力,从而增强肌肉的力量,逐步恢复到正常状态。2.1.2 程序设计 该软件采用 VC++6.0创建的基于单文档的 MFC应用程序。游戏开始后病人通过控制机械臂的水平运动,控制虚拟场景中水平挡板的移动反弹小球,击打上画面上方的矩形砖块。如图 3所示。程序开始运行后,通过 GDI绘制出弹球游戏的基本场景,小球和水平移动挡板,完成游戏参数的基
基于虚拟现实的网络化上肢康复训练系统,标签:电子小制作,http://www.88dzw.com2.1配合阻抗训练模式的虚拟现实辅助训练软件设计
2.1.1 阻抗训练模式介绍
该训练模式适用于即将康复的患者,这类患者的患肢已经逐步恢复运动能力,这时就可以根据患者的康复情况,在康复锻炼过程中通过机器人给患者的患肢作用一定大小的阻尼力,使患者完成动作的时候克服阻力,从而增强肌肉的力量,逐步恢复到正常状态。
2.1.2 程序设计
该软件采用 VC++6.0创建的基于单文档的 MFC应用程序。游戏开始后病人通过控制机械臂的水平运动,控制虚拟场景中水平挡板的移动反弹小球,击打上画面上方的矩形砖块。如图 3所示。程序开始运行后,通过 GDI绘制出弹球游戏的基本场景,小球和水平移动挡板,完成游戏参数的基本初始化工作。在创建框架窗体的同时使用 CAsyncSocket类的 MySocket派生类,初始化训练客户端套接字,封装了网络通信消息响应函数。并重载了其中的 OnReceive(), OnAccept(),OnConnect(),OnClose()等消息响应函数,这些函数分别映射 CMyView类中相应的处理函数。完成套接字初始化后,立即与下位机服务器连接,并开始接收下位机传送的位置和力度数据。当有网络数据到达时,程序映射调用 CMyView类中的 OnReceive()函数,完成接收下位机传送的位置信号数据,通过公式(1)
shippositon=(long)(-w*855/180) (1) www.88dzw.com
其中 w为接收到的机械臂角度值,shippositon为经过换算后的挡板在屏幕上位置的坐标点数值。将机械臂角度值转化为虚拟环境中水平挡板的实际位置值,最后传送至 Moveship()函数中完成移动挡板,碰撞检测,刷新场景等流程。水平挡板在程序运行开始后初始化在视图区域中间位置,即机器人机械臂 90度位置。当病人左右移动机械臂时,由下位机根据与 90度位置偏离程度的大小,通过计算输出相应大小的阻尼力。程序一共分为三个难度等级,每一难度等级的砖块全部击打完毕并进入下一难度等级。每增加一级,程序会加速小球的下落速度来提高游戏难度。运行时程序同时记录病人的得分情况和游戏生命值。

2.2配合主动训练模式的虚拟现实辅助训练软件设计
2.2.1 主动训练模式介绍 该训练模式适用于病情比较轻的患者,这些的患者的患肢虽然有些运动障碍,但是没有完全丧失运动能力,因此可以通过设计一些具有良好交互性的虚拟场景游戏,使患者完全自主地利用康复机器人进行锻炼。
2.2.2程序设计
整个软件采用VC++6.0创建的 win32 application应用程序,调用 OpenGL的库函数开发。软件所涉及的带有贴图的 3D模型和其他图形素材,采用了现成的资源,这样既保证了图形图像的质量又提高了开发效率。该辅助训练软件结合主动训练模式,给病人提供了宽广的 3D虚拟场景,通过训练臂,并辅助一个罗技游戏摇杆进行漫游,患者通过机械臂控制场景人物平面方位角的改变,辅助游戏摇杆负责场景人物的前进,后退,俯仰角度以及射击击发。患者需要完成的交互训练任务是尽快在该场景中找出移动的目标靶并射击命中。如图 4所示:
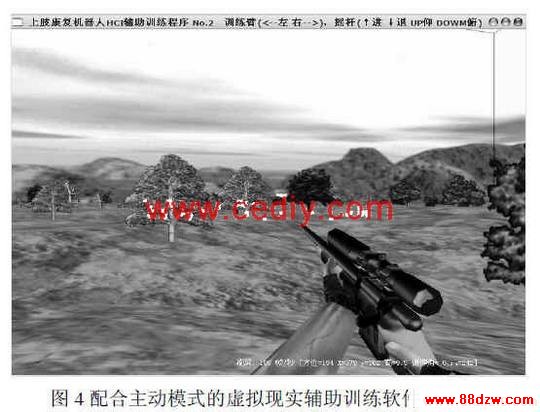
该程序首先由 Win32应用程序框架中的WinMain()函数提供程序的入口。当窗口成功建立时,MsgProc()窗口回调函数调出OpenGL框架中Init()函数对OpenGL视图进行变换调整。Windows窗口生成后就进入 GameLoop()主循环中,在此一直循环调用 OpenGL框架中的Render()函数进行我们需要的图形场景处理和显示,程序退出时,调用 CleanUp()清除OpenGL连接。在交互方面,程序初始化时采用 Winsock 2.0建立了套接字,通过局域网接收下位机传送的机械臂位置数据,通过计算转化为场景人物的平面旋转角度。从而达到实时交互的目的。前进后退,俯仰角度的改变以及子弹的发射,采用键盘按键消息事件的方式实现,再通过游戏摇杆驱动程序关联响应的按键,达到摇杆辅助控制的目的。程序分别使用mciSendString函数和 sndPlaySound函数来实现游戏过程中的各种音效。
《基于虚拟现实的网络化上肢康复训练系统》相关文章
- › 基于虚拟现实的网络化上肢康复训练系统
- 在百度中搜索相关文章:基于虚拟现实的网络化上肢康复训练系统
- 在谷歌中搜索相关文章:基于虚拟现实的网络化上肢康复训练系统
- 在soso中搜索相关文章:基于虚拟现实的网络化上肢康复训练系统
- 在搜狗中搜索相关文章:基于虚拟现实的网络化上肢康复训练系统
编辑推荐
- ・ 自制教室照明节电控制器
- ・ 双色音乐彩灯的制作
- ・ 三相交流电机缺相保护器
- ・ 声光控节能灯的制作
- ・ 同线电话转呼及互通器电路
- ・ 超低频信号发生器的制作
- ・ 自制热转印电路板
- ・ 警笛发声生器电路
- ・ 一款节能电路
- ・ 利用太阳能充电的旅行充电器