


 当前位置:
当前位置:带跟瞄功能的视觉眼孔通信模型研究
[10-10 20:42:03] 来源:http://www.88dzw.com 电子制作 阅读:8181次
文章摘要:在瞄准中,瞄准目标小幅度抖动现象对运动目标瞄准是经常存在的。在此给出抖动目标瞄准的Rician分布及图示图4和图5。 围绕目标抖动,给出跟瞄ATP分析图示见图6:4 结论首次提出机器人视觉系统眼孔波通信框架或眼孔波通信框架,这种眼孔波的信息传送可以用小型大气激光通信系统在机器人视觉中的应用的方法实现。本文提出了眼孔波通信构架,解决了该通信系统的捕获和跟瞄问题(ATP问题),建立了相应数学模型。www.88dzw.com3 信标光瞄准及瞄准误差正态、瑞利分布研究3.1 二维瞄准误差分析捕获过程是一个统计过程,在发射机和接收机已对准的情况下,有因为不同的姿态导致的瞄准角误差,也有由于热量变形而导致
带跟瞄功能的视觉眼孔通信模型研究,标签:电子小制作,http://www.88dzw.com在瞄准中,瞄准目标小幅度抖动现象对运动目标瞄准是经常存在的。在此给出抖动目标瞄准的Rician分布及图示图4和图5。
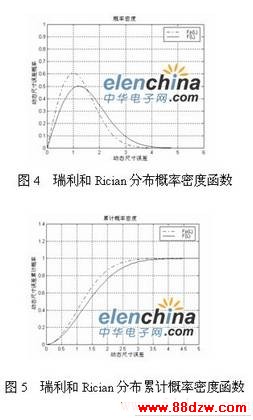
围绕目标抖动,给出跟瞄ATP分析图示见图6:

4 结论
首次提出机器人视觉系统眼孔波通信框架或眼孔波通信框架,这种眼孔波的信息传送可以用小型大气激光通信系统在机器人视觉中的应用的方法实现。本文提出了眼孔波通信构架,解决了该通信系统的捕获和跟瞄问题(ATP问题),建立了相应数学模型。
3 信标光瞄准及瞄准误差正态、瑞利分布研究
3.1 二维瞄准误差分析
捕获过程是一个统计过程,在发射机和接收机已对准的情况下,有因为不同的姿态导致的瞄准角误差,也有由于热量变形而导致的误差,从而使发射机和接收机偏离使通信中断。
在两通信机之间进行捕获的最流行的方法,包括在一个通信机上使用一个信标信号,在另一个通信机上使用FPA(CCD)探测和一个跟踪系统。瞄准系统精确的仰角和方位角对FPA(CCD)输出信号产生响应。由于跟踪系统中震动噪声、热量噪声等的影响,到达接收通信机的光束会抖动,抖动方向的瞄准误差角模型是基于法线分布的。前人给出的是角度瞄准误差分布研究[3],由于角度瞄准误差在实验中不如尺寸瞄准误差测量方便,本文在测量距离为Z的条件下,提出将角度瞄准误差用靶面尺寸瞄准误差表达,并提出对捕获范围、捕获可能性的相应推导。
俯仰角靶面尺寸瞄准误差的概率密度正态分布为:
 (1)
(1)
![]() 和
和 ![]() 分别是俯仰角尺寸瞄准标准差和俯仰角瞄准靶面尺寸。
分别是俯仰角尺寸瞄准标准差和俯仰角瞄准靶面尺寸。
方位角靶面尺寸瞄准误差的概率密度正态分布为:
 (2)
(2)
![]() 和
和 ![]() 分别是方位角尺寸瞄准标准差和方位角瞄准靶面尺寸。
分别是方位角尺寸瞄准标准差和方位角瞄准靶面尺寸。
Tag:电子制作,电子小制作,维修教程知识 - 电子制作
《带跟瞄功能的视觉眼孔通信模型研究》相关文章
- › 带跟瞄功能的视觉眼孔通信模型研究
- 在百度中搜索相关文章:带跟瞄功能的视觉眼孔通信模型研究
- 在谷歌中搜索相关文章:带跟瞄功能的视觉眼孔通信模型研究
- 在soso中搜索相关文章:带跟瞄功能的视觉眼孔通信模型研究
- 在搜狗中搜索相关文章:带跟瞄功能的视觉眼孔通信模型研究
编辑推荐
最新更新
热门排行