


 当前位置:
当前位置:电力线载波通讯模块在机器人控制技术中的应用
[09-13 17:01:35] 来源:http://www.88dzw.com 控制技术 阅读:8613次
文章摘要: 字节只读寄存器,寄存的标志信息反映如下事实: ·一个数据包已收到或接收出现意外。 ·一个发送过程已完成或传输出现意外。 ·物理层错误或主机传输介面出错。 ·设备的复位状态3.3 控制寄存器 2字节只写寄存器,提供如下控制信息: ·确定主机忙闲与否; ·是否忽略掉一个数据包的接收过程; ·控制一个数据包的接收过程。3.4 状态寄存器 只读寄存器,共6个字节。寄存上次数据包传输状态,P200的设备型号与版本号。3.5 数据通道控制寄存器 只写1字节寄存器。确定数据通道建立最短时间。3.6 数据接受状态
电力线载波通讯模块在机器人控制技术中的应用,标签:计算机控制技术,工厂电气控制技术,http://www.88dzw.com字节只读寄存器,寄存的标志信息反映如下事实:
·一个数据包已收到或接收出现意外。
·一个发送过程已完成或传输出现意外。
·物理层错误或主机传输介面出错。
·设备的复位状态
3.3 控制寄存器
2字节只写寄存器,提供如下控制信息:
·确定主机忙闲与否;
·是否忽略掉一个数据包的接收过程;
·控制一个数据包的接收过程。
3.4 状态寄存器
只读寄存器,共6个字节。寄存上次数据包传输状态,P200的设备型号与版本号。
3.5 数据通道控制寄存器
只写1字节寄存器。确定数据通道建立最短时间。
3.6 数据接受状态寄存器
1字节只读寄存器,确定接受数据时物理层检测失败的错误类型。
3.7 数据包
数据包由一个头文件和待发送的信息组成。头文件包含控制场和地址场。控制场包含控制接收或发送信息时的控制指令。地址场包括了数据包的地址信息。
值得注意的是,P200数据传输软件介面是由主控制微处理器Host Micro下载的,由于P200内部寄存器的易失性每次上电时,主控制微处理器Host Micro都必须对P200重新下载安装一次软件介面。
4 使用P200控制器构成的电力线载波通讯模块在壁面清洗爬壁机器人系统中应用
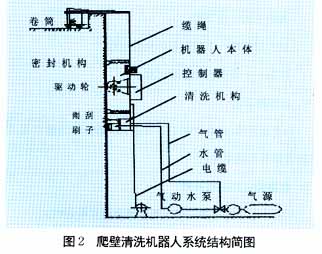
图2为我校研制的爬壁清洗机器人,其主要由机器人本体,控制系统,清洗机构,地面控制器,保险与卷扬升降控制系统构成。其基本工作原理是:由地面控制器向本体控制器发出指令,机器人本体上的高速风机起动,产生较强吸附力,使机器人本体安全可靠地吸附在工作壁面上。然后驱动两套交流伺服电机,带动车轮使机器人在玻璃、瓷砖等壁面上快速移动,同时清洗机械开始工作完成相应清洗任务。在本体快速移动同时,卷扬升降系统也在地面控制器作用下相应升降运动,使保险悬挂机构与机器人本体随动。
由上可见,机器人系统在工作时,地面控制器、机器人主体控制器、卷扬升降系统控制器,三者间必须相互协调,交换信息,才能保证机器人的正常运行。这种信息的交换正是使用P200控制器构成的电力线载波通讯模块,通过由地面拉上去的电力线进行电力线载波通讯完成的。
图3所示为壁面清洗机器人电力线载波通讯控制方案。当操作者按动地面控制器功能键发出工作指令时,单片机AT89C51把信息送到显示模块显示,同时经电力线载波通讯模块发送到电力线上。P200在发送指令信息时,附加上了地址号,由于主体控制器与卷扬控制器的P200模块具有不同的地址号,由地面控制器发来的信息只能被地址号相符的一方所接受。主体控制器与卷扬控制器也可把相应的现场信息反馈到地面控制器,当地面控制器收到反馈信息后,由于各模块地址唯一,会作出正确的解释,并及时地向发信方发出回执,现场控制器在收到回执后知道信息已收到,会自动停止发送反馈信息,否则发送反馈信息会定时进行。
5 电力线载波通讯模块在壁面清洗机器人联网运行中应用
在清洗一个复杂壁面时,为提高工效,可使用多台机器人联网运行。由于多台机器人都使用Intellon P200模块利用电力线通讯,如不采取措施,会发生信息传输的混乱[3]。为防止混乱在两方面要采取措施。其一:机器人与机器人之间通讯如何协调。其二:机器人各部分之间如何协调。从前述内容我们知道单台爬壁清洗机器人控制系统有地面控制器,主控制器,卷场升降控制器三大部分,事实上这三大部分的P200模块电路构成是完全相同的。都由一个主控单片机,一个P200模块,一个功率放大器及若干滤波器外围电路组成,为此我们设计了一个标准的嵌入式P200模块电路供所有功能模块使用,如图4所示。
Tag:控制技术,计算机控制技术,工厂电气控制技术,控制技术
- 上一篇:简易恒温控制器电路图2
《电力线载波通讯模块在机器人控制技术中的应用》相关文章
- › 电力线载波的遥控报警器电路图
- › 电力线载波通讯模块在机器人控制技术中的应用
- › 基于低压电力线载波技术的病房呼叫系统
- › 电力线载波通信(LMl893)集成电路
- › 电力线载波报警器
- 在百度中搜索相关文章:电力线载波通讯模块在机器人控制技术中的应用
- 在谷歌中搜索相关文章:电力线载波通讯模块在机器人控制技术中的应用
- 在soso中搜索相关文章:电力线载波通讯模块在机器人控制技术中的应用
- 在搜狗中搜索相关文章:电力线载波通讯模块在机器人控制技术中的应用
分类导航
最新更新