


 当前位置:
当前位置:基于AT89S52的声音导引系统设计
[10-10 20:38:44] 来源:http://www.88dzw.com 单片机学习 阅读:8411次
文章摘要:www.88dzw.com3.2 程序流程图 程序流程如图7所示。4 测试数据4.1 基本要求 (1)可移动声源发出声音后开始运动,到达ox线并停止,这段运动时间为响应时间,测量响应时间,用下列公式计算出响应的平均速度,要求平均速度大于5 cm/s。 (2)可移动声源停止后的位置与ox线之间的距离即定位误差,定位误差小于3 cm。 (3)可移动声源在运动过程中任意时刻超过ox线左侧的距离,超过ox线左侧的距离小于5 cm。 (4)可移动声源到达ox线后,必须有明显的光和声指示。 (5)将可移动声源转向180°(可手动调整发声器件方向),能够重复基本要
基于AT89S52的声音导引系统设计,标签:单片机开发,单片机原理,http://www.88dzw.comwww.88dzw.com
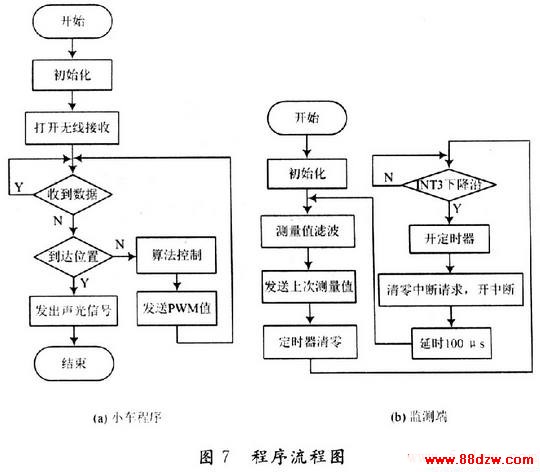
3.2 程序流程图
程序流程如图7所示。
4 测试数据
4.1 基本要求
(1)可移动声源发出声音后开始运动,到达ox线并停止,这段运动时间为响应时间,测量响应时间,用下列公式计算出响应的平均速度,要求平均速度大于5 cm/s。

(2)可移动声源停止后的位置与ox线之间的距离即定位误差,定位误差小于3 cm。
(3)可移动声源在运动过程中任意时刻超过ox线左侧的距离,超过ox线左侧的距离小于5 cm。
(4)可移动声源到达ox线后,必须有明显的光和声指示。
(5)将可移动声源转向180°(可手动调整发声器件方向),能够重复基本要求。
4.2 发挥部分
(1)平均速度大于10 cm/s;定位误差小于1 cm;可移动声源在运动过程中任意时刻超过ox线左侧距离小于2 cm。
(2)在完成基本要求部分移动到ox线上后,可移动声源在原地停止5~10 s,然后利用接收器A和C,使可移动声源运动到W点,到达W点以后,必须有明显的光和声指示并停止,此时声源距离W的直线距离小于1 cm。整个运动过程的平均速度大于10 cm/s。
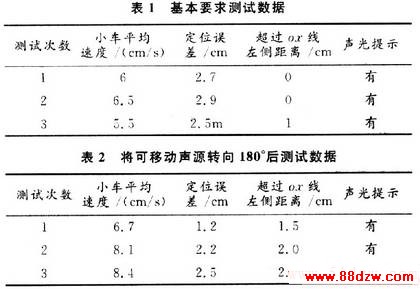
4.3 基本要求测试
测试数据表如表l所示。将可移动声源转向180°(可手动调整发声器件方向),重复上述基本要求。测试数据表如表2所示。
4.4 发挥部分测试
测试数据如表3所示。
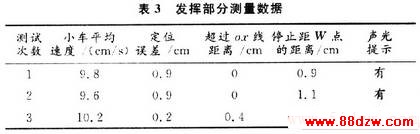
经测试数据显示,该设计能够达到大赛的基本要求,对于发挥部分也基本能够实现。
5 结语
该设计基于完备可靠的硬件设计,采用NEC电子电机控制ASSP芯片和AT89S52的控制和运算优势,使用了一套独特的软件算法,实现了声音导引系统的精确控制。
式中:△un为第n次输出增量;en为第n次偏差;en-1为第n-1次偏差;en-2为第n-2次偏差。增量式PID控制系统中的KP,KI,KD参数,一般经反复测试、分析,最终确定理想数值。考虑到算法的简单可行和实际应用,采用方案一最简单,且能够实现小车速度的控制。
2 单元硬件电路设计
根据系统组成框图,系统只要由以下几部分电路组成.对各电路的设计与实现,分别有以下不同的设计方案。
2.1 可移动声源调制电路设计
可移动声源产生的信号为周期性音频脉冲信号。利用RC振荡电路产生可调的周期性音频脉冲信号,经功率放大再由扬声器向外发送,该方案产生的音频信号高次谐波信号较大,经过电路的改进使高次谐波大大减小,可以满足设计要求。电路图
Tag:单片机学习,单片机开发,单片机原理,维修教程知识 - 单片机学习
《基于AT89S52的声音导引系统设计》相关文章
- › 基于ATmega48的微功耗电刺激器的设计
- › 基于AT90S2313-4PC的MP3无线遥控自动点播机
- › 基于AT91M40800的音频视频处理系统设计
- › 基于AT90S8515的串行通信及其应用
- › 基于AT89S51单片机的出租车计价器系统设计
- › 基于ATmega128的智能安全帽特性检测仪设计
- 在百度中搜索相关文章:基于AT89S52的声音导引系统设计
- 在谷歌中搜索相关文章:基于AT89S52的声音导引系统设计
- 在soso中搜索相关文章:基于AT89S52的声音导引系统设计
- 在搜狗中搜索相关文章:基于AT89S52的声音导引系统设计
最新更新