


 当前位置:
当前位置:单片机在汽车驾驶模拟器中的应用
[10-10 20:38:44] 来源:http://www.88dzw.com 单片机学习 阅读:8565次
文章摘要: 为了实现精确控制,该文中采用位置式积分分离型PID控制算法对电机转速进行控制。积分分离型PID控制算法与普通PID算法相比较,其优越性体现在:消除电动机力矩改变较大时造成的静差。计算机编程实现积分分离型PID控制的程序框图,如图5所示。 从图5中可看出,PID算法并不是一直计算,当两者相差比较小时,该计算无实际意义且占用过多资源,但当偏差大于一定值时才启动。采用积分分离型PID控制算法后,其控制效果比普通PID控制算法有较大的改善,由文献的比较图可明显看出。可变占空比的输出波形如图6所示。5 结论 该控制电路可控制直流力矩电机的转速、转向及输出力矩,电路简单,容易实现,结合
单片机在汽车驾驶模拟器中的应用,标签:单片机开发,单片机原理,http://www.88dzw.com为了实现精确控制,该文中采用位置式积分分离型PID控制算法对电机转速进行控制。积分分离型PID控制算法与普通PID算法相比较,其优越性体现在:消除电动机力矩改变较大时造成的静差。计算机编程实现积分分离型PID控制的程序框图,如图5所示。
从图5中可看出,PID算法并不是一直计算,当两者相差比较小时,该计算无实际意义且占用过多资源,但当偏差大于一定值时才启动。
采用积分分离型PID控制算法后,其控制效果比普通PID控制算法有较大的改善,由文献的比较图可明显看出。可变占空比的输出波形如图6所示。
5 结论
该控制电路可控制直流力矩电机的转速、转向及输出力矩,电路简单,容易实现,结合PID控制算法实现电机的精确控制;该系统可在不改变硬件电路的情况下,通过改写软件程序实现多种控制;为了减少控制器件与驱动电路的干扰,电路中采用光电耦合器并加入4只磁片电容消除射频辐射,使系统更安全、可靠。此控制系统在汽车驾驶模拟器中经实验验证其输出与实际很接近,精确度满足模拟要求。

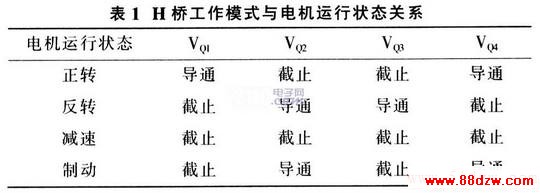
图3中VQl、VQ3为P沟道MOSFET,VQ2、VQ3为N沟道MOSFET;电阻R1~R4用来保护器件不受损坏;二极管(VD1~VD4)是在MOSFET关断时起保护作用,防止电动机的感应电流损坏MOSFET;电容器(C1~C4)的值通常小于10 pF,主要用于减少换向器换相引起的干扰。H桥工作模式与电机运行状态的关系如表1所示。
3 计算机与单片机的通讯
计算机与单片机使用串口通讯,考虑到串口的输出电压高达十几伏,而单片机正常工作电压仅3.3 V,仅兼容5 V电压,串口输出为RS-232电平,而单片机为TTL电平,因此,应在串口输出与单片机之间加一电平转换电路。这里采用MAX3232实现电平转换,其电路图如图4所示。
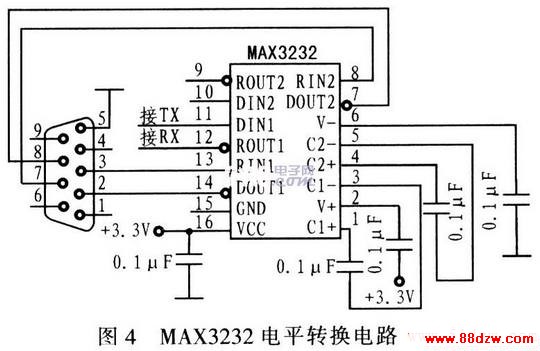
在设计该电平转换电路时应注意以下几点:1)电路中的电容为0.1μF,实际应用中如果MAX3232的引脚2和引脚6电压达不到要求,则可换为1μF的电容,但使用中要注意正负极性。2)MAx3232的串口的引脚7与引脚8悬空。3)若MAX3232的引脚16接地电阻选用钽电容,可用其正极接地,但作者经过数次试验后发现电容发热严重,故建议采用负极接地,且正极接地时若电压过高有可能发生爆炸。
4 回正力矩的计算及模拟的实现
本系统选用直流力矩电机作为力矩输出。直流力矩电机输出力矩与电流的幅值成正比,所以调速系统的关键是控制电动机电流大小。电机力矩控制采用单片机的PWM方式改变电机的平均电压,根据实际所需的电动机力矩计算所需的占空比,从而实时控制电机。
回正力矩的计算是由上位机完成的,上位机由测得的车速及方向盘的转角,计算出此时方向盘上受到的回正力矩。上位机将计算得的数值通过接口传送到单片机对力矩电机进行控制,同时力矩传感器将电机的实际输出力矩反馈给单片机的ADC模块,如果实际值与计算值不符,计算机就用PID算法进行调速。最终使输出与计算值相一致。
《单片机在汽车驾驶模拟器中的应用》相关文章
- › 单片机在多功能电子秤应用
- › MSP430单片机在电力系统操作电源中的应用
- › 单片机在无线接入固定终端中实现内部通话的运用
- › 单片机在晶闸管触发电路中设计及应用
- › 单片机在汽车驾驶模拟器中的应用
- › PIC单片机在家用电暖气中的应用
- 在百度中搜索相关文章:单片机在汽车驾驶模拟器中的应用
- 在谷歌中搜索相关文章:单片机在汽车驾驶模拟器中的应用
- 在soso中搜索相关文章:单片机在汽车驾驶模拟器中的应用
- 在搜狗中搜索相关文章:单片机在汽车驾驶模拟器中的应用