


 当前位置:
当前位置:基于DSP的CAN总线系统设计与实现
[10-10 20:38:44] 来源:http://www.88dzw.com 单片机学习 阅读:8485次
文章摘要: 图6表示为上位机接收数据的调试界面。可以看到,CAN通信和下位机间的数据通信,可以写数据并发送给下位机,同时也可接收下位机的数据来验证电路及软件的正确性。5 结束语 利用TMS320F2812内嵌的eCAN模块可使得硬件电路设计更为简单而可靠,而且性能也较已有的DSP内嵌的CAN控制器有较大的提高。同时,采用C语言编程,则可使得程序的设计难度降低,提高程序的可维护性并缩短开发时间。www.88dzw.com 在TM320F2812的eCAN模块与USB-CAN模块之间进行通信时,上位机可选用派恩公司的USB-CAN模块,其调试界面为PCANView。这里将eCAN的邮箱0配
基于DSP的CAN总线系统设计与实现,标签:单片机开发,单片机原理,http://www.88dzw.com图6表示为上位机接收数据的调试界面。可以看到,CAN通信和下位机间的数据通信,可以写数据并发送给下位机,同时也可接收下位机的数据来验证电路及软件的正确性。
5 结束语
利用TMS320F2812内嵌的eCAN模块可使得硬件电路设计更为简单而可靠,而且性能也较已有的DSP内嵌的CAN控制器有较大的提高。同时,采用C语言编程,则可使得程序的设计难度降低,提高程序的可维护性并缩短开发时间。
在TM320F2812的eCAN模块与USB-CAN模块之间进行通信时,上位机可选用派恩公司的USB-CAN模块,其调试界面为PCANView。这里将eCAN的邮箱0配置成发送邮箱,邮箱5配置成发送邮箱,并采用扩展信息帧格式。发送采用查询方式,接收用中断方式,同时可采用DsP将接收的数据转发回上位机,并对接收和发送的数据进行错误计数。图1所示为采用上位机设置端口、波特率等参数,并通过USB-CAN模块与下位机通信的调试界面图,它可用来检验TM320F2812的CAN总线通信是否正常。

3 硬件设计
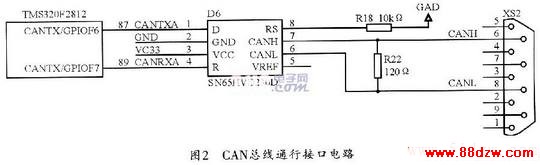
本设计的硬件系统分为两层:第一层是CAN总线与TMS320F12812接口层,用来实现CAN总线和TMS320F12812的物理接口;第二层为DSP与外
围器件的信息处理层,其中TMS320F2812是针对控制领域应用而设计的一款新型工控芯片,它集成了数字IO、事件管理器、A/D模数转换、SPI串行外设接口、SCI异步串行通信接口、CAN控制器等控制资源。其CAN总线通信接口电路如图2所示。
4 软件设计
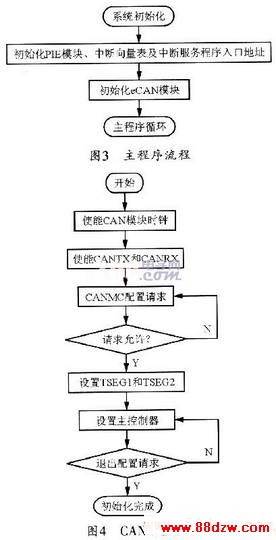
在使用CAN控制器之前,首先必须对它的内部寄存器进行初始化设置,包括相关IO口设置以及邮箱的相关配置。这里着重介绍如何进行初始化设置和发送与接收的配置。图3所示是本系统的主程序流程图,其CAN配置流程如图4所示。
Tag:单片机学习,单片机开发,单片机原理,维修教程知识 - 单片机学习
《基于DSP的CAN总线系统设计与实现》相关文章
- › 基于DSP的光伏电池最大功率点跟踪系统
- › 一种基于DSP的直流电源供电系统的设计
- › 基于DS89C430的超声导波激励信号源的设计
- › 基于DSP和CPLD的智能相机系统设计与研制
- › 基于DSP和ARM的音频处理系统设计
- › 基于DSP的数码相机中的MPEG-4压缩
- 在百度中搜索相关文章:基于DSP的CAN总线系统设计与实现
- 在谷歌中搜索相关文章:基于DSP的CAN总线系统设计与实现
- 在soso中搜索相关文章:基于DSP的CAN总线系统设计与实现
- 在搜狗中搜索相关文章:基于DSP的CAN总线系统设计与实现
最新更新