


 当前位置:
当前位置:无线传感器网络自身定位算法研究
[09-12 18:39:49] 来源:http://www.88dzw.com 传感技术 阅读:8967次
文章摘要:在定位阶段,采用了最小二乘法(Lateration)进行计算,当未知节点获得与3个或3个以上锚节点(xi,yi)的距离di时,根据以下式子,可推出计算公式:由式(1)可推出: 令: 利用公式(2),(3)可求得:最后利用公式: 来判断所求的结果是否有效,当residue超过无线射程时,结果是无效的。 在求精阶段,节点测量得到所有一跳邻居的距离并依次更新自己的位置。该算法的所有位置计算都使用最小二乘法。算法引入了置信度来提高求精阶段的性能,置信度被用来在三边定位中加权。当未知节点更新其位置估计时同样也更新其置信度。这样,网络的平均置信度将随迭代而增加,提高了覆盖度和精度。该算法的定位精度比较高
无线传感器网络自身定位算法研究,标签:传感技术知识,传感器与检测技术,http://www.88dzw.com在定位阶段,采用了最小二乘法(Lateration)进行计算,当未知节点获得与3个或3个以上锚节点(xi,yi)的距离di时,根据以下式子,可推出计算公式:
由式(1)可推出:
 |
令:
利用公式(2),(3)可求得:
最后利用公式:

来判断所求的结果是否有效,当residue超过无线射程时,结果是无效的。
在求精阶段,节点测量得到所有一跳邻居的距离并依次更新自己的位置。该算法的所有位置计算都使用最小二乘法。算法引入了置信度来提高求精阶段的性能,置信度被用来在三边定位中加权。当未知节点更新其位置估计时同样也更新其置信度。这样,网络的平均置信度将随迭代而增加,提高了覆盖度和精度。
该算法的定位精度比较高,在网络连通度较高的情况下能较好地容忍距离误差。但由于对网络拓扑的依赖,需要较长的覆盖时间。
2.1.2 N-hop multilateration算法
在N-hop multilateration算法中,测距使用的是超声波测距技术,该算法也分为3个阶段,第一阶段是生成协作子树,根据判定条件,在网络中生成多个由未知节点和锚节点组成的限制条件完整或超限制条件的构形,称为协作子树。每个构形包括n个未知变量(未知节点的坐标)和至少n个非线性方程式,并确保每个未知变量拥有惟一解。未被协作子树包含的节点在整个算法的后处理阶段进行定位。
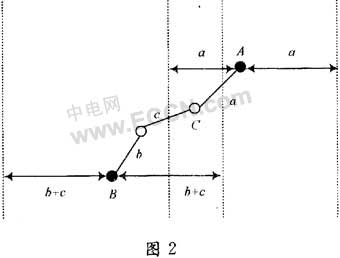
第二阶段是对未知节点位置的粗略估计,他通过粗略未知节点和锚节点问的距离来估算未知节点的位置。如图2所示,未知节点C在锚节点A,B所形成的Boundingbox里面,可推算出节点所在位置的x坐标的取值范围是(|xA-a|,|xB+(b+c)|)。
 |
第三阶段采用了循环求精,根据预设的定位精度,使用卡尔曼滤波技术在每个协作子树范围内(每个节点位置有惟一解)对第二阶段的结果进行循环求精。
该算法要求锚节点要求锚节点要部署在网络的边缘才能达到较好的效果,而且循环求精的次数无法预知。
2.1.3 算法分析
对于传感器网络节点定位算法,定位精度是个主要的评估标准,上述两种算法都采用了求精的步骤,仿真结果显示定位精度有了比较大的提高,但各自又有不足之处,在测距阶段,Robust positioning算法采用了DV-hop的算法,DV-hop算法是基于距离矢量交换协议的,在大型网络中需要较长的覆盖时间,而N-hop multilateration算法却采用了硬件测距的方法,提高了网络的成本。
- 上一篇:温度传感器在笔记本电脑中的应用
《无线传感器网络自身定位算法研究》相关文章
- › 基于ATmega128L与CC2420的无线传感器网络节点的研究与实现
- › 基于嵌入式网络的无线传感器网络平台软硬件实现
- › 无线传感器网络自身定位算法研究
- › 无线传感器开发系统的设计及实现
- › 一种无线传感器网络节点的开发
- › 基于MC13192的无线传感器网络节点设计
- 在百度中搜索相关文章:无线传感器网络自身定位算法研究
- 在谷歌中搜索相关文章:无线传感器网络自身定位算法研究
- 在soso中搜索相关文章:无线传感器网络自身定位算法研究
- 在搜狗中搜索相关文章:无线传感器网络自身定位算法研究