


 当前位置:
当前位置:基于微步驱动的开关磁阻电机转矩脉动控制系统
[09-13 17:03:43] 来源:http://www.88dzw.com 控制技术 阅读:8452次
文章摘要:图1 SRM旋转磁场转矩矢量 对于(8/6)四相SR电动机而言,A相绕组产生的稳定零位和B相绕组产生的稳定零位错开一个步进角,在空间按几何角度15度,若用电角度表示90度。如规定转子顺时针方向旋转为正转,则只要按A-B-C-D的顺序依次给各相绕组供电,开关磁阻电动机的转子以步进角15度一步一步的正转。假定忽略电动机的互感,允许将转矩进行矢量相加,即得到图1所示的旋转磁场转矩矢量,其中TAB 、TBC、TCA和TAD称为派生转矩矢量,表示两相同时供电的合成转矩;TA、TB、TC、TD称为基本转矩矢量,他们相位取决于定子磁极中心线的空间位置,表示一相单独供电时的转矩,相临两个转矩错开步进角3
基于微步驱动的开关磁阻电机转矩脉动控制系统,标签:计算机控制技术,工厂电气控制技术,http://www.88dzw.com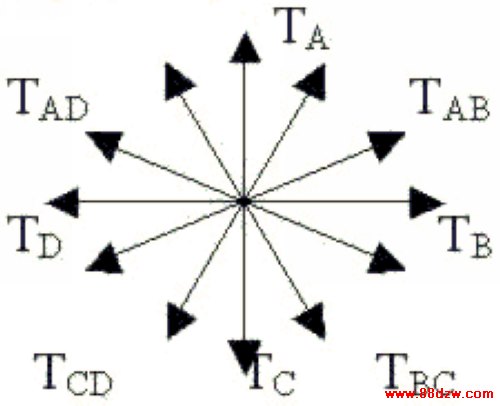
图1 SRM旋转磁场转矩矢量
对于(8/6)四相SR电动机而言,A相绕组产生的稳定零位和B相绕组产生的稳定零位错开一个步进角,在空间按几何角度15度,若用电角度表示90度。如规定转子顺时针方向旋转为正转,则只要按A-B-C-D的顺序依次给各相绕组供电,开关磁阻电动机的转子以步进角15度一步一步的正转。假定忽略电动机的互感,允许将转矩进行矢量相加,即得到图1所示的旋转磁场转矩矢量,其中TAB 、TBC、TCA和TAD称为派生转矩矢量,表示两相同时供电的合成转矩;TA、TB、TC、TD称为基本转矩矢量,他们相位取决于定子磁极中心线的空间位置,表示一相单独供电时的转矩,相临两个转矩错开步进角3.75度。派生转矩和基本转矩的关系可表示为下列向量形式:
TAB=TA+TB…………………………(4)
派生转矩矢量的相位可以通过对绕组电流幅值的控制加以调节,使它出现在基本转矩矢量之间的任何相位上,采用控制绕组电流的办法增加SRM的每转步数,提高分辨率,减小转矩脉动。随着电动机每转细分步数的增加,可供选择的最佳离散电流波形为正弦函数波形,如果能够控制各相绕组的电流为正弦波,则实现SRM的连续控制。
四、微分驱动在SRM控制系统中的实现
由以上对(8/6)SRM转矩控制原理的分析可知,开关磁阻电机细分驱动的核心就是为了实现转矩矢量幅值相等,控制相绕组电流跟随给定转速对应的给定电流大小,使实时转速保持在给定转速误差范围内,从而有效减小了转矩的脉动。
同时导通的两相绕组电流可表示为下式,式中为合成矢量对应的电流大小:
ia=Im*cosθ;
ib=Im*sinθ; ………………………………………(5)
则合成电流矢量i(以ia为参考):

i是一个以Im为幅值,-θ为辐角的矢量。这样,由式(1)、(6)可知,每当θ的值发生变化时,合成的矢量转过一个相应的角度,且幅值大小保持不变,实现了恒力矩的细分驱动。利用式(5)可得到细分后通电相电流数据。
所以要控制转矩必须控制电流,而控制电流是以控制PWM功率变换器输出脉宽被调制的功率开关信号为直接控制量,使实际输出电流按阶梯波电流变化。因此SRM的微分驱动要靠控制PWM的占空比来实现。用下式表示加在导通相绕组的PWM信号的占空比:
Ya=Y*cosθ ;
Yb=Y*sinθ ;……………………………………(7)
上式中:Y为占空比幅值; Ya,Yb分别为Y在通电相绕组的分量;θ为转矩角;
(7)式中的占空比幅值Y与 速度闭环中的给定速度通过量化换算得出线性对应关系:
Y=k*n;k为比例系数;
所以在速度给定的前提下,占空比幅值Y保持恒定,由(7)式可知,只要调整特定平衡位置的转矩角即可控制各相PWM脉宽占空比分量,根据(5)式与(7)式的对应关系,由各相占空比分量大小的变化从而控制了导通相电流的大小。
(8/6)四相SRM转子极距角(周期)为60度,每相步进角为15度,因此微分驱动的行为即是要细分该15度的步进角,在15度的步进角中找到三个转矩平衡位置,由于SRM绕组电流的大小受PWM功率变换器控制,所以调节PWM输出脉宽即可使实际输出电流如图2所示按阶梯波电流变化,各相通电顺序为:
- 上一篇:基于PLC的高炉槽下控制系统
《基于微步驱动的开关磁阻电机转矩脉动控制系统》相关文章
- › 基于微步驱动的开关磁阻电机转矩脉动控制系统
- 在百度中搜索相关文章:基于微步驱动的开关磁阻电机转矩脉动控制系统
- 在谷歌中搜索相关文章:基于微步驱动的开关磁阻电机转矩脉动控制系统
- 在soso中搜索相关文章:基于微步驱动的开关磁阻电机转矩脉动控制系统
- 在搜狗中搜索相关文章:基于微步驱动的开关磁阻电机转矩脉动控制系统