


 当前位置:
当前位置:德国BAHR直角坐标机器人在无损探伤设备的应用
[09-13 17:02:27] 来源:http://www.88dzw.com 控制技术 阅读:8395次
文章摘要:应用案例二:三坐标龙门机器人对小型零件的检测。一、工作要求: 1、采用超声波检测(UT)方法对飞机的各种小型零部件进行无损扫描检测。 2、探伤范围:X , Y , Z 轴的有效行程分别为800mm ,600mm 和 400mm 。在 Z 轴下端上装配 旋转超声探头。探头旋转角度是 0~360°。 3、工件形状:工件形状包含圆弧、直线、曲面等各种元素,所以要求机器人能够方便实现空间插补。 4、定位精度及分辨率:重复定位度为±0.05mm,系统分辨率0.01 mm 5、控制系统:系统要求能够对检测数据要进行分析处理,包括显示出探伤扫描图像、滤波、增强放大、旋转、特征提
德国BAHR直角坐标机器人在无损探伤设备的应用,标签:计算机控制技术,工厂电气控制技术,http://www.88dzw.com应用案例二:三坐标龙门机器人对小型零件的检测。
一、工作要求:
1、采用超声波检测(UT)方法对飞机的各种小型零部件进行无损扫描检测。
2、探伤范围:X , Y , Z 轴的有效行程分别为800mm ,600mm 和 400mm 。在 Z 轴下端上装配
旋转超声探头。探头旋转角度是 0~360°。
3、工件形状:工件形状包含圆弧、直线、曲面等各种元素,所以要求机器人能够方便实现空间插补。
4、定位精度及分辨率:重复定位度为±0.05mm,系统分辨率0.01 mm
5、控制系统:系统要求能够对检测数据要进行分析处理,包括显示出探伤扫描图像、滤波、增强放大、旋转、特征提取、将探伤结果打印或上传给上位机、位置标记 等。同时要求系统能够根据工件的图纸生成可执行的运动控制文件。
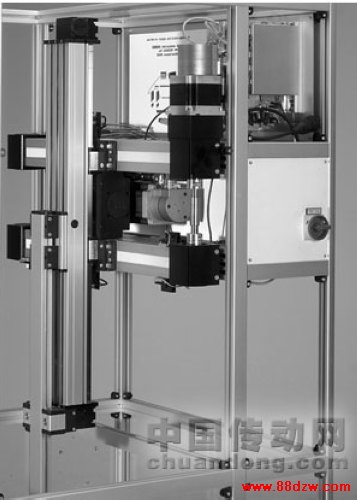
二、机器人组成:
该机器人由安装架、机器人定位系统、伺服驱动系统、末端检测设备(相机)、控制系统等组成。
1、机器人安装架
检测室的运动速度较慢,负载较轻,使用铝型支架就可以了。
2、机器人定位系统
机器人定位系统是整台设备的核心,为德国bahr公司产品, X,Y,Z三坐标均选择为同步齿形带传动,单坐标重复定位精度为0.05mm,最快直线运动速度:1000mm/s。
其中X坐标轴为两根长度为1200mm,跨度为800mm的定位系统ELZ40,由同步传输器保证两根定位系统运动的同步,由一台400W伺服电机驱动。出于驱动扭矩及惯量的匹配,需要配一台行星减速机。
Y轴选用ELZ40和ELR40定位单元,由于结构要求,两个定位单元上下并排放置。ELZ40为主驱动结构,ELR40位辅助结构。两根定位系统由一台400W伺服电机驱动,出于驱动扭矩及惯量的匹配,需要配一台行星减速机。
Z轴选用ELSZ40定位系统单元,出于安装考虑,滑块需要延长,并与Y轴滑块固定在一起。,驱动定位体的伺服电机驱动和滑块安装在一起。。实际应用中我们选择了一台400W带抱闸的伺服电机,匹配了一台行星减速机。
旋转轴安装在Z轴的末端,于一台微型伺服电机带动一台精密行星减速机形成,超声波探头安装在减速机的输出端,随减速机的旋转而旋转。
3、伺服驱动系统
选用具有总线功能伺服电机。每个运动轴配有一台伺服电机及一台精密减速机,四个运动轴,共四套伺服电机和四台减速机,其中垂直运动轴为带抱闸伺服电机。
4、探伤系统
该部分由超声波探头、数据处理模块辅助水槽等组成。
5、控制系统
控制系统由PLC、触摸屏组成。该系统拥有强大的Profibus通讯功能。能够将数据实时传输给以太网,能够将控制指令以总线的方式发送给伺服系统,使整个的运动相当流畅。该系统可预置多种工件的程序,更换品种时可在触摸屏上调用相应程序。
6、安全防护装置
该机具有故障提示及报警功能,并且每次出现故障时都能准确的反映出故障具体位置,便于迅速排除故障,主要包括:机器人碰撞保护功能;工件安装到位检测;光幕安全保护。
 <--
<--《德国BAHR直角坐标机器人在无损探伤设备的应用》相关文章
- › 德国BAHR直角坐标机器人在无损探伤设备的应用
- › 德国BAHR直角坐标机器人在检测设备上的应用
- 在百度中搜索相关文章:德国BAHR直角坐标机器人在无损探伤设备的应用
- 在谷歌中搜索相关文章:德国BAHR直角坐标机器人在无损探伤设备的应用
- 在soso中搜索相关文章:德国BAHR直角坐标机器人在无损探伤设备的应用
- 在搜狗中搜索相关文章:德国BAHR直角坐标机器人在无损探伤设备的应用