


 当前位置:
当前位置:一种基于S7-200 PLC的位置控制器研究设计
[09-12 18:35:26] 来源:http://www.88dzw.com EDA/PLD 阅读:8832次
文章摘要: 对于由伺服电机带动的旋转物体进行位置控制,通常采用套轴式的电磁旋转变压器加复杂的处理电路来实现角度的编码,再由角度编码进行位置的闭环控制。上述的位置控制多用于测角精度要求高的场合中,设备构成复杂、成本较高。在某些实际应用中,需要进行较为简单的位置定位。比如在一个由伺服电机带动的机械机构需要在360°的旋转范围内进行4个或多个档位的定位,实际应用中像建筑行业中控制阀门的大小来对给水量、水泥量、沙石量进行控制或军工工程控制,这样的定位控制精度要求不高,采用上述的方法进行位置控制显然不够经济,成本过高。PLC(Programmable Logic Controller)在工业控制中应用广泛
一种基于S7-200 PLC的位置控制器研究设计,标签:eda技术,eda技术实用教程,http://www.88dzw.com对于由伺服电机带动的旋转物体进行位置控制,通常采用套轴式的电磁旋转变压器加复杂的处理电路来实现角度的编码,再由角度编码进行位置的闭环控制。上述的位置控制多用于测角精度要求高的场合中,设备构成复杂、成本较高。在某些实际应用中,需要进行较为简单的位置定位。比如在一个由伺服电机带动的机械机构需要在360°的旋转范围内进行4个或多个档位的定位,实际应用中像建筑行业中控制阀门的大小来对给水量、水泥量、沙石量进行控制或军工工程控制,这样的定位控制精度要求不高,采用上述的方法进行位置控制显然不够经济,成本过高。
PLC(Programmable Logic Controller)在工业控制中应用广泛。其高可靠性、高稳定性、友好的编程环境以及辅以触摸式人机界面,使得各种工业控制更方便直观、经济可靠。这里主要阐述了基于S7-200PLC实现位置控制方法。
1 系统硬件设计
该系统是以PLC控制器为核心的位置控制系统,包含伺服电机、光电编码器、操作及显示屏、上位计算机、伺服电机控制电路和状态返回电路。其硬件总体结构框图如图1所示。

1.1 S7-200 PLC
该系统设计核心部件采用西门子S7-200系列的PLC,该系列PLC功能丰富,具有多种功能模块,可方便通过人机界面对设备进行操作和监视其状态,高版本的PLC主机拥有2个通讯端口,在使用人机界面对设备进行操作的同时还可通过RS-485接口和计算机实现逻辑运算及状态管理,对设备进行远程控制和监视。该系统使用S7-200 PLC的一个重要的功能:高速可逆计数。光电编码器和伺服电机同轴连接,伺服电机旋转带动光电编码器产生连续的脉冲串,PLC通过输入点读取光电编码器产生的脉冲,实现高速可逆计数。例如设置高、中、低3个给水量档位并进行控制。在调试阶段应先驱动伺服电机进行3个给水量的位置标定,也就是说,高、中、低3个档位分别对应唯一的脉冲数。应该注意的是,由于采用的是增量式光电编码器,也就是说,当编码器掉电后并不能将当前的脉冲数保存。所以在旋转机构上还要设置2个限位开关,一来保护机械结构;二来把逆向的限位开关的位置定为零位,这样相对于这个零位的高、中、低3个给水档位从光电编码器读到的脉冲数即为这3个档位的位置。这3个位置可通过PLC编程对其控制。图2给出S7-200 PLC高速可逆计数器的时序图。

1.2 光电编码器
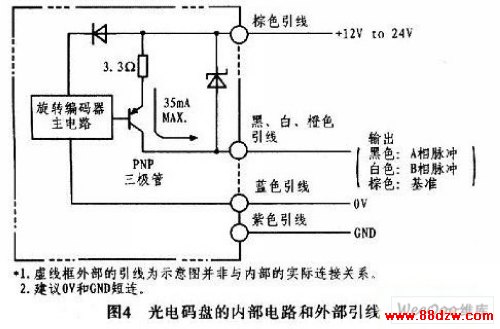
光电编码器,是一种通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器。这是目前应用最多的传感器,光电编码器是由光栅盘和光电检测装置组成。光栅盘是在一定直径的圆板上等分地开通若干个长方形孔。由于光电码盘与电动机同轴,电动机旋转时,光栅盘与电动机同速旋转,经发光二极管等电子元件组成的检测装置检测输出若干脉冲信号,此外,为判断旋转方向,码盘还可提供相位相差90°的两路脉冲信号。图3为在实际项目中采用光电编码器的时序图,从图中可以看出此光电编码器的相位判断角度为90°±45°;另外图中标识的CW(顺时针)和CCW(逆时针)可以根据实际应用在PLC程序中自行定义。图4为在实际项目中采用光电编码器的内部电路和外部引线图。

《一种基于S7-200 PLC的位置控制器研究设计》相关文章
- › 一种基于Modelsim FLI接口的协同仿真技术
- › 一种基于S7-200 PLC的位置控制器研究设计
- › 一种基于CPLD的声发射信号传输系统设计
- › 一种基于FPGA的VGA图象信号发生器设计
- › 一种基于H.264的快速运动估计算法
- › 一种基于FPGA的多路视频通道控制系统设计
- 在百度中搜索相关文章:一种基于S7-200 PLC的位置控制器研究设计
- 在谷歌中搜索相关文章:一种基于S7-200 PLC的位置控制器研究设计
- 在soso中搜索相关文章:一种基于S7-200 PLC的位置控制器研究设计
- 在搜狗中搜索相关文章:一种基于S7-200 PLC的位置控制器研究设计