


 当前位置:
当前位置:基于FPGA的磁浮轴承控制系统研究
[09-12 18:26:31] 来源:http://www.88dzw.com EDA/PLD 阅读:8809次
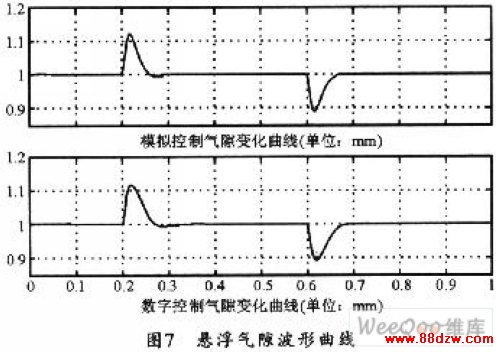
文章摘要:加载/减载可使用Flux*来描述,用以表示在0.2 s和0.6 s时刻阶跃加载和减载400N。其仿真结果如图7所示,所得到的悬浮气隙波形曲线中的上方为模拟控制,下方为数字控制。电流输出结果要缩小1000倍,图8所示是其磁铁电流曲线(单位A),其中实际额定电流值设定为3.3 A。上方为模拟控制,下方为数字控制。4 硬件协同仿真硬件协同仿真就是在对Matlab―Simulink环境下所设计的算法模型进行仿真后,“System Gen-erator”可以结合实际“Xilinx―FPGA”的硬件资源生成一个集成有该算法的“硬核”;然后通过FPGA把“硬核”下载至FPGA中。最后以同样的信号作为输入,一
基于FPGA的磁浮轴承控制系统研究,标签:eda技术,eda技术实用教程,http://www.88dzw.com 加载/减载可使用Flux*来描述,用以表示在0.2 s和0.6 s时刻阶跃加载和减载400N。其仿真结果如图7所示,所得到的悬浮气隙波形曲线中的上方为模拟控制,下方为数字控制。
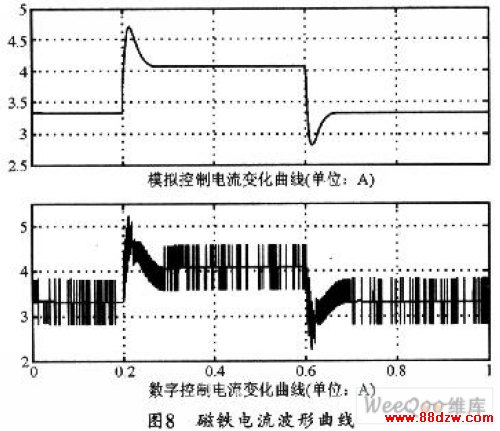
电流输出结果要缩小1000倍,图8所示是其磁铁电流曲线(单位A),其中实际额定电流值设定为3.3 A。上方为模拟控制,下方为数字控制。
4 硬件协同仿真
硬件协同仿真就是在对Matlab―Simulink环境下所设计的算法模型进行仿真后,“System Gen-erator”可以结合实际“Xilinx―FPGA”的硬件资源生成一个集成有该算法的“硬核”;然后通过FPGA把“硬核”下载至FPGA中。最后以同样的信号作为输入,一路信号接“软件算法模型”,一路信号接“硬核”,同时观测两者的输出。如果处理结果一致,则可证明Matlab―Simulink环境下所设计的DSP模型是硬件可行的。
在对数字控制系统仿真运行协同仿真之后,就会生成新的数字PID模块。然后把它重新接入数字控制系统仿真框图中,就会得到如图9所示的硬件协同仿真系统框图。
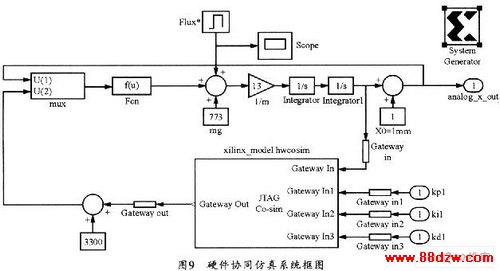
用图5的理论控制与图9进行对比,然后连接开发板,打开电源,并运行模型进行仿真,则可从仿真波形中很明显的看到,硬件协同仿真的结果和理论结果完全一样。
5 结束语
本文采用System Generator对基于FPGA的磁浮轴承控制系统进行了仿真,并将其下载到FP-GA开发板进行硬件协同,结果证明,在加载/减载400N力时,所设计的数字PID控制器能较好的完成对磁浮轴承系统的控制,并实现稳定悬浮。
Tag:EDA/PLD,eda技术,eda技术实用教程,EDA/PLD
《基于FPGA的磁浮轴承控制系统研究》相关文章
- › 基于FPGA的单片彩色LCD投影机设计
- › 256级灰度LED点阵屏显示原理及基于FPGA的电路设计
- › 基于FPGA的LCD%26amp;VGA控制器设计
- › 基于FPGA的信道化接收机
- › 基于FPGA和SMT387的SAR数据采集与存储系统
- › 基于FPGA的栈空间管理器的研究和设计
- 在百度中搜索相关文章:基于FPGA的磁浮轴承控制系统研究
- 在谷歌中搜索相关文章:基于FPGA的磁浮轴承控制系统研究
- 在soso中搜索相关文章:基于FPGA的磁浮轴承控制系统研究
- 在搜狗中搜索相关文章:基于FPGA的磁浮轴承控制系统研究
分类导航
最新更新