


 当前位置:
当前位置:数字式MEMS加速度传感器在车载导航中的应用
[09-12 18:41:16] 来源:http://www.88dzw.com 传感技术 阅读:8106次
文章摘要: 图3测量电路原理框图 (1) 测量部分电路主要由ADXL 202JE构成,并辅助以一些滤波及调节电路; (2) 系统控制电路部分主要由AT89C52单片机以及MAX232构成,由单片机处理占空比调制信号,MAX232芯片实现串口通信; (3)GPS模块选用摩托罗拉的GT型Oncore接收器。 软件设计 单片机采用中断触发的方式来测量传感器输出脉冲周期,从而计算当前系统的倾斜角,并结合GPS模块判断车辆是否上高架,主要流程框图如图4 所示。 图4程序流程图 结论与讨论
数字式MEMS加速度传感器在车载导航中的应用,标签:传感技术知识,传感器与检测技术,http://www.88dzw.com图3 测量电路原理框图
(1) 测量部分电路主要由ADXL 202JE构成,并辅助以一些滤波及调节电路;
(2) 系统控制电路部分主要由AT89C52单片机以及MAX232构成,由单片机处理占空比调制信号,MAX232芯片实现串口通信;
(3)GPS模块选用摩托罗拉的GT型Oncore接收器。
软件设计
单片机采用中断触发的方式来测量传感器输出脉冲周期,从而计算当前系统的倾斜角,并结合GPS模块判断车辆是否上高架,主要流程框图如图4 所示。
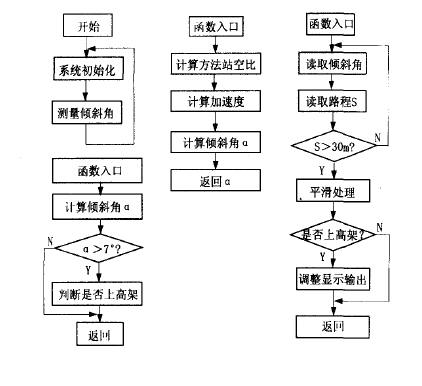
图4 程序流程图
结论与讨论
测量动态加速度的带宽选择
ADXL 202JE带宽式中:
占空比调制器周期的确定
对于ADXL 202JE,当DCM输出方波频率大于模拟带宽10倍以上,测量准确度就很理想,因此周期越小越好。但是周期的减小对微控制器的处理速度要求会提高,而实际中硬件的处理速度是受到器件性能限制的。综合以上因素,方波的周期是根据模拟带宽、处理器速度以及测量分辨力的要求共同确定的。
实验分析
根据实际的精度要求,实验选用1uF 的滤波电容,这样带宽为5Hz,噪声约为0.43mg。Rs阻值为1M,这样输出方波周期约为141Hz。采用12M晶振的单片机,这样占空比的精度可到达0.14%。在实际车载实验中,经过滤波和平滑处理,并通过反复调试基本实现了设计目的(图5 是实际测得的数据)。
图5 车辆上下高架时倾斜角测量曲线
结 论
应用上述的设计方法及其要点,基本实现了对车辆定位的要求,达到了预期效果。实践证明ADXL 202JE非常适合于频率变化较为缓慢、加速度不太大的测量。在充分考虑各种因素基础上,合理设计有关参数,就可以得到很好的准确度。
Tag:传感技术,传感技术知识,传感器与检测技术,传感技术
- 上一篇:称重传感器高精度自动检测系统设计
《数字式MEMS加速度传感器在车载导航中的应用》相关文章
- › 数字式MEMS加速度传感器在车载导航中的应用
- 在百度中搜索相关文章:数字式MEMS加速度传感器在车载导航中的应用
- 在谷歌中搜索相关文章:数字式MEMS加速度传感器在车载导航中的应用
- 在soso中搜索相关文章:数字式MEMS加速度传感器在车载导航中的应用
- 在搜狗中搜索相关文章:数字式MEMS加速度传感器在车载导航中的应用
分类导航
最新更新