


 当前位置:
当前位置:贴片机的贴装头运动
[09-12 18:50:21] 来源:http://www.88dzw.com PCB设计 阅读:8137次
文章摘要:A.贴装头的结构图1为CP842的贴装头结构,它由吸嘴(Nozzle)、吸嘴头和轴杆3部分组成。贴装头和最上端的齿轮通过锥形离合器连接。而锥形离合器可以带动轴杆旋转,完成贴片部件的旋转。轴杆是由两节组成,两节间通过滚珠和槽做直线相对滑动。长度可以在贴装过程中由于重力作用而自由调节。图1 CP842吸嘴机构示意图吸嘴头上面是真空阀,在拾取元件位置,置件位置或者NG元件排出位时候,被吹气机构切换真空阀门。吸嘴头上最多安装6个吸嘴,每个吸嘴后座由弹簧保持紧密。吸嘴头周围用荧光纸反射光线。贴装头的运动是通过齿轮带动围绕处于中间的塔进行的。塔身上有椭圆型凹槽,当齿轮带动吸嘴运动时,贴装头在凹槽上下运动,
贴片机的贴装头运动,标签:pcb培训,pcb是什么,pcb软件,http://www.88dzw.comA.贴装头的结构
图1为CP842的贴装头结构,它由吸嘴(Nozzle)、吸嘴头和轴杆3部分组成。贴装头和最上端的齿轮通过锥形离合器连接。而锥形离合器可以带动轴杆旋转,完成贴片部件的旋转。轴杆是由两节组成,两节间通过滚珠和槽做直线相对滑动。长度可以在贴装过程中由于重力作用而自由调节。
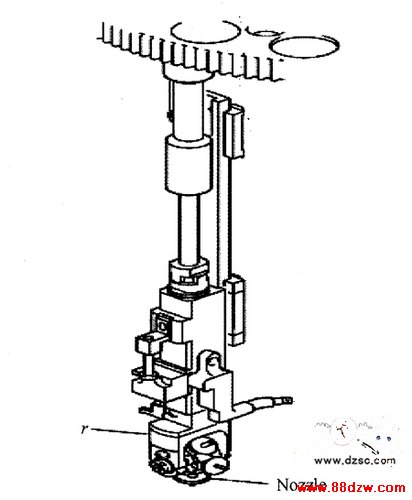
图1 CP842吸嘴机构示意图
吸嘴头上面是真空阀,在拾取元件位置,置件位置或者NG元件排出位时候,被吹气机构切换真空阀门。
吸嘴头上最多安装6个吸嘴,每个吸嘴后座由弹簧保持紧密。吸嘴头周围用荧光纸反射光线。
贴装头的运动是通过齿轮带动围绕处于中间的塔进行的。塔身上有椭圆型凹槽,当齿轮带动吸嘴运动时,贴装头在凹槽上下运动,使贴装头在拾取和贴装的时候处于最低位置,如图2所示虚线为凹槽。
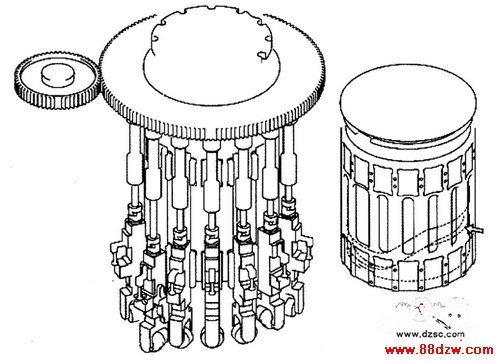
图2 塔身示意图
B.贴装头的运动
CP842共有16个贴装头,每个贴装头有6个吸嘴,每一个贴装头对应一个站,贴装头在齿轮带动下,经过所有的站,完成一个贴装周期,而贴装的快慢由齿轮的转速和影像处理的速度决定。各站的功能分述如下(如图3所示)。
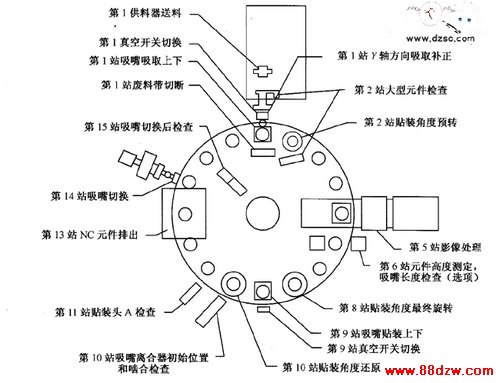
图3 贴装头名称功能示意图
第1站:贴装头在该站吸取元件。在该站由主机控制料站平台伺服电动机,使得需要的供料器到达第1站吸嘴位置。第1站的机构压下供料器上的棘爪,使得料带前进一格到达吸嘴正下方。此时真空阀被打开拾取元件(当元件高度不同时,吸嘴的高度是不同的,位于该位置的弹簧杠杆和吹气机构把真空阀门向下压,从而切换到真空)。吸嘴在拾取元件的同时,废料切刀动作,废料带被切刀切断,废料带被吸走。吸嘴拾取元件靠的是打开真空开关使得元件附在吸嘴上,不同大小的元件有不同的吸嘴供选择。在拾取元件时,一般供料器和吸嘴之间高度为0.65~0.70 mm。
第2站:大型元件检查,并且做90°,180°或者-90°旋转(根据程序的需要,使得角度最接近最终贴装角度)。当拾取的是SOIC,PLCC和CSP等芯片大型元件的时候(这里指的大型元件是高度超过1 mm的元件),需要对元件检查。因为这些元件一般质量比较大,而且贴装精度要求高。如果在第8站一起完成,由于惯性,精确度会降低。实际运用中,很少会用CP842贴装芯片,而是由专门的另外一台机器完成。
第3到第4站无动作。
第5站:影像处理。宽视角或者窄视角CCD相机检测:a所拾取元件的大小和形状;b元件的位置误差量;c拾取成功与否,并将信号送到主机处理。
第6站:元件高度测定,吸嘴长度检查。该站为可选项,主要为贴装大型元件而设置。
第7站:该站无动作。
第8站:贴片角度最终旋转。根据第5站返回的信号跟程序存储的角度相比较。由主机上的机构动作驱动离合器动作转动轴杆,使整个贴装头旋转,从而带动元件旋转到最终PCB上的角度。
第9站:元件贴装。此时处于第9站位置的真空切换机构利用气压动作打开真空开关,切换到非真空状态,元件由于重力落到PCB上。由于贴装时吸嘴和PCB之间的位置非常接近,落下时间很短,同时记录转塔凹槽的减速动作,使得其离心力很小,位置精度得到保证。一般元件和PCB间的距离为0.3 mm。该距离可以根据需要调整Z轴的高度而变化。调整精度为0.1 mm/100脉冲(脉冲)。如果第5站检测到拾取的元件异常(如形状或者大小部不在规定范围内),则依然保持真空,不放置元件。
《贴片机的贴装头运动》相关文章
- › 多功能贴片机的视觉系统
- › 多功能贴片机的结构特点
- › 贴片机的贴装头运动
- › 贴片机的旋转头复合式结构
- › 贴片机的调整
- › 贴片机的基板支持范围
- 在百度中搜索相关文章:贴片机的贴装头运动
- 在谷歌中搜索相关文章:贴片机的贴装头运动
- 在soso中搜索相关文章:贴片机的贴装头运动
- 在搜狗中搜索相关文章:贴片机的贴装头运动