


 当前位置:
当前位置:基于CAN总线的分布式位置伺服系统设计
[09-13 16:55:12] 来源:http://www.88dzw.com 接口定义 阅读:8580次
文章摘要:4 实验结果及分析本系统实现1个脚踏板同时对2个油门阀的控制,脚踏板电位器输出的电压信号经主控制器PLC的模拟量输入口进行A/D转换,再通过CAN总线接口发给2个伺服驱动节点,控制油门阀的开度快速精确跟踪脚踏板的运动变化。在实际应用过程中,PLC还用于整车的其他控制功能。由于通信线使用的是普通双绞线的特征阻抗120 Ω,所以需要在CAN总线两端的CANH和CANL之间各加1个120 Ω的终端电阻,使总线阻抗匹配,以较好地抑制干扰。经过实验,系统能够达到以下要求:(1)在波特率250 Kb/s、总线长度100 m的情况下,各节点之间通信正常,2个伺服驱动节点能正常工作。(2)推杆的有效运动长度约
基于CAN总线的分布式位置伺服系统设计,标签:接口技术,微机原理与接口技术,http://www.88dzw.com4 实验结果及分析
本系统实现1个脚踏板同时对2个油门阀的控制,脚踏板电位器输出的电压信号经主控制器PLC的模拟量输入口进行A/D转换,再通过CAN总线接口发给2个伺服驱动节点,控制油门阀的开度快速精确跟踪脚踏板的运动变化。在实际应用过程中,PLC还用于整车的其他控制功能。由于通信线使用的是普通双绞线的特征阻抗120 Ω,所以需要在CAN总线两端的CANH和CANL之间各加1个120 Ω的终端电阻,使总线阻抗匹配,以较好地抑制干扰。
经过实验,系统能够达到以下要求:
(1)在波特率250 Kb/s、总线长度100 m的情况下,各节点之间通信正常,2个伺服驱动节点能正常工作。
(2)推杆的有效运动长度约为50 mm,5 s内可实现全程运动,可满足油门阀调节快速性的要求。
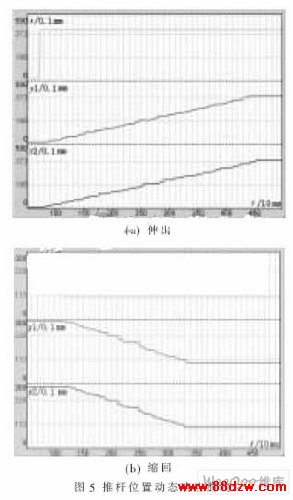
(3)图5是调试过程中通过CodeSys开发环境的变量观察窗口绘出的2个推杆运动的阶跃响应曲线,其中图5(a)是控制推杆伸出的情况,图5(b)是缩回的情况。图中,x表示位置给定量的阶跃变化,y1、y2分别表示2个推杆位置对阶跃给定的动态响应曲线。由图可以看出,2个推杆的位置均能及时跟随给定量的变化,并能达到控制精度的要求。
本文设计的分布式直流电动伺服系统已经应用在某大型工程运输车的油门阀控制中,其工作稳定可靠,与气动油门相比,大大提高了油门控制的响应速度和系统的可靠性。该系统的伺服驱动节点结构简单、成本低廉,CAN总线网络的应用使整个系统具有很强的通用性和可扩展性,根据应用需要可以方便地增减驱动节点的数量,实现更多轴和多点的伺服控制系统,并进一步实现多电机的协同控制。
Tag:接口定义,接口技术,微机原理与接口技术,接口定义
- 上一篇:基于散列DMA的高速串口驱动设计
《基于CAN总线的分布式位置伺服系统设计》相关文章
- › 基于CAN总线的电池管理系统结构框图
- › 基于CAN总线的分布式位置伺服系统设计
- › 基于CAN总线的智能型温湿度采集系统设计
- › 基于CAN总线接口的红外检测系统的设计思路
- › 基于Cadence的高速PCB设计
- › 基于CAN核的四冗余通信板设计与仿真
- 在百度中搜索相关文章:基于CAN总线的分布式位置伺服系统设计
- 在谷歌中搜索相关文章:基于CAN总线的分布式位置伺服系统设计
- 在soso中搜索相关文章:基于CAN总线的分布式位置伺服系统设计
- 在搜狗中搜索相关文章:基于CAN总线的分布式位置伺服系统设计
分类导航
最新更新