


 当前位置:
当前位置:基于FPGA的太阳跟踪器的设计及实现
[09-12 18:34:50] 来源:http://www.88dzw.com EDA/PLD 阅读:8797次
文章摘要:高度角-方位角跟踪又叫做地平坐标系双轴跟踪系统,采光板的方位轴垂直于地平面,另一根轴与方位轴垂直,称为俯仰轴。工作时采光板根据太阳的视日运动绕方位轴转动改变方位角,绕俯仰轴作俯仰运动改变采光板的倾斜角,从而使采光板与太阳光线垂直。这种跟踪系统的特点是跟踪精度高,而且采光板装置的重量保持在垂直轴所在的平面内,支承结构的设计比较容易。在本文中采用了高度角一方位角跟踪进行设计。2 太阳跟踪控制系统设计根据上文介绍的高度角-方位角跟踪系统的整体框架,本文基于Xilinx公司的FPGA开发板,设计了基于FPGA的太阳跟踪系统的各功能模块。主要包括计时模块、太阳高度角方位角计算模块、日出日落时间计算模块和
基于FPGA的太阳跟踪器的设计及实现,标签:eda技术,eda技术实用教程,http://www.88dzw.com
高度角-方位角跟踪又叫做地平坐标系双轴跟踪系统,采光板的方位轴垂直于地平面,另一根轴与方位轴垂直,称为俯仰轴。工作时采光板根据太阳的视日运动绕方位轴转动改变方位角,绕俯仰轴作俯仰运动改变采光板的倾斜角,从而使采光板与太阳光线垂直。这种跟踪系统的特点是跟踪精度高,而且采光板装置的重量保持在垂直轴所在的平面内,支承结构的设计比较容易。在本文中采用了高度角一方位角跟踪进行设计。
2 太阳跟踪控制系统设计
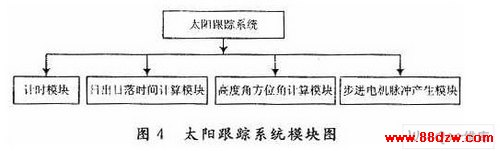
根据上文介绍的高度角-方位角跟踪系统的整体框架,本文基于Xilinx公司的FPGA开发板,设计了基于FPGA的太阳跟踪系统的各功能模块。主要包括计时模块、太阳高度角方位角计算模块、日出日落时间计算模块和步进电机脉冲控制模块等几部分。
基于FPGA的太阳跟踪控制系统的流程图如图2和图3所示。

首先系统根据计时模块计算出当前的时间,包括当日在一年中的日期序数dn(单位:日)及当前的时刻T(单位:h),然后再根据日出日落时间计算模块确定当日的日出和日落时间,以便判断当时时间是否在日出后日落前。在程序计算过程中,利用太阳高度角和方位角计算模块计算当前太阳的位置,并与上次计算的太阳的位置作差,分别计算出当前跟踪装置高度和方位需要调整的角度及其旋转方向,并随后进入步进电机脉冲驱动模块。首先调整高度角,判断高度角差值的正负,驱动高度方向的步进电机旋转。高度角步进电机停止旋转后调整方位角。判断方位角正负,驱动方位角步进电机按照偏差旋转相应的角度。一次跟踪后,在一定的时间间隔T后,系统再次提取时间计算、判断、旋转电机。当日落时间到时,控制步进电机旋转至次日太阳升起的位置并恢复初始状态。由此本系统就实现了对太阳的全天候、实时跟踪。
3 基于FPGA的太阳跟踪系统各模块设计
太阳跟踪系统模块图如图4所示。这里对基于FPGA的太阳实时跟踪系统建立的计时模块、日出日落时间计算模块、高度角方位角计算模块、步进电机脉冲产生模块的设计及结果进行详细的介绍。
3.1 计时模块
视日运动跟踪方法需要时间和地理纬度信息,一般的太阳跟踪系统的位置固定,可以自行设定其地理纬度值。对于时间建立了计时模块,通过对时钟进行多级分频输出视日运动跟踪算法所需的间信息。
3.2 太阳日出日落时间计算模块
此模块计算每天太阳的日出日落时间,据此保证在太阳的照射时间范围内,太阳跟踪系统正常运行,在非照射时间,太阳跟踪系统处于休眠状态。太阳的日出日落时间即太阳的高度角为零的时间。由高度角计算公式(8)和时角计算公式(9)推出太阳的日出日落时间公式(10)。

太阳日出日落时间计算模块仿真波形如图5所示,输出为10 b Q4格式,dn为时间序号,其中richu代表日出时刻,riluo代表日落时刻。对太阳日出日落模块输出结果分析如表1所示,dn为仿真随机选取的日期,太阳日出日落时间只与dn有关。对该模块输出的10 b Q4格式的时间计算其实际的代表值,并与理论计算值做比较,经计算其输出时间误差很小,该模块能够准确计算出日出日落时间。
- 上一篇:基于FPGA的两种DDS实现
《基于FPGA的太阳跟踪器的设计及实现》相关文章
- › 基于FPGA的单片彩色LCD投影机设计
- › 256级灰度LED点阵屏显示原理及基于FPGA的电路设计
- › 基于FPGA的LCD%26amp;VGA控制器设计
- › 基于FPGA的信道化接收机
- › 基于FPGA和SMT387的SAR数据采集与存储系统
- › 基于FPGA的栈空间管理器的研究和设计
- 在百度中搜索相关文章:基于FPGA的太阳跟踪器的设计及实现
- 在谷歌中搜索相关文章:基于FPGA的太阳跟踪器的设计及实现
- 在soso中搜索相关文章:基于FPGA的太阳跟踪器的设计及实现
- 在搜狗中搜索相关文章:基于FPGA的太阳跟踪器的设计及实现