


 当前位置:
当前位置:基于双单片机通信的无刷直流电动机控制系统的设计
[09-12 16:04:35] 来源:http://www.88dzw.com 单片机学习 阅读:8958次
文章摘要: 在无刷直流电动机控制系统中,通常用DSP对信号进行采集和处理。但由于DSP的价格昂贵,在一些实时性要求不高的场合,可以用MCS-51单片机来代替DSP控制无刷直流电动机的起停、正反转和调速。本文设计并实现了一种基于双单片机通信的无刷直流电动机控制系统。该设计方案电路简单、可靠性强、价格便宜。系统主要包括单片机控制电路、逻辑保护电路、过流保护电路、驱动电路、测速电路、转子位置检测电路等。其原理如图1所示。表1 电机正转换相表1 转子位置检测电路控制无刷直流电动机时,必须要知道转子的位置。在本设计方案中,采用了三个光电式位置传感器。这种传感器利用光电效应,由跟随电动机转子一起旋转的遮光板
基于双单片机通信的无刷直流电动机控制系统的设计,标签:单片机开发,单片机原理,单片机教程,http://www.88dzw.com在无刷直流电动机控制系统中,通常用DSP对信号进行采集和处理。但由于DSP的价格昂贵,在一些实时性要求不高的场合,可以用MCS-51单片机来代替DSP控制无刷直流电动机的起停、正反转和调速。
本文设计并实现了一种基于双单片机通信的无刷直流电动机控制系统。该设计方案电路简单、可靠性强、价格便宜。系统主要包括单片机控制电路、逻辑保护电路、过流保护电路、驱动电路、测速电路、转子位置检测电路等。其原理如图1所示。
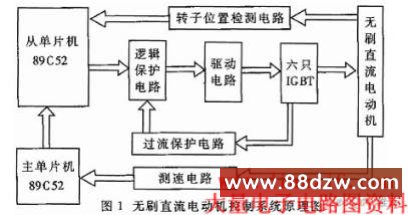
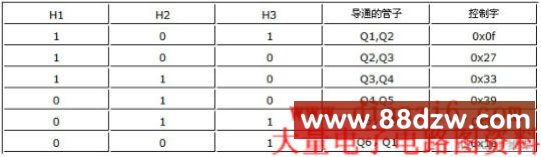
表1 电机正转换相表
1 转子位置检测电路
控制无刷直流电动机时,必须要知道转子的位置。在本设计方案中,采用了三个光电式位置传感器。这种传感器利用光电效应,由跟随电动机转子一起旋转的遮光板和固定不动的光源及光电管等部件组成。遮光板开有180°电角度左右的缝隙。随着电机转子的旋转,光电管间歇接收从光源发出的光,不断导通和截止,从而产生一系列0、1信号。这些信号通过P0口传输给单片机后,单片机通过P1口送出相应的控制字,就能很好地控制电机的换相。其控制原理图和换向控制表如图2和表1所示。

2 驱动电路
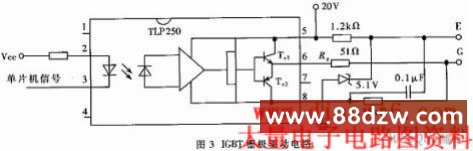
绝缘栅极双极型晶体管IGBT的栅极驱动电压一般为15V±10%,而关断负偏置电压为5~6V。因此选用TLP250驱动IGBT,电路如图3所示。 TLP250内部是光电耦合的,实现将控制电路与主电路隔离。当3脚接收到一个低电平时,VGE输出近似为15V,可以驱动IGBT使其导通;相反,当3 脚接收到一个高电平时,VGE输出近似为-5V,使IGBT截止。六只TLP250随着输入电平变化,可以很好地控制IGBT的开断,从而实现换相。
3 保护电路
3.1 起动时的限流保护电路
电动机起动时,由于转速较低,故转子磁通切割定子绕组所产生的反电势很小,因而可能产生过大的电流I。通常要加过流保护电路,如图4所示。主回路中通过电动机的电流最终通过电阻Rf接地。因此,Uf=Rf・IM,其大小正比于电动机的电流IM,Uf通过10kΩ电阻与电压比较器LM324反相输入端相连。当Uf大于LM324正相输入端给定电压U0时,LM324输出低电平。使发光二极管导通,则三极管C端输出低电平。由于C端与三输入与非门74LS10相连,不论另外两输入如何,其输出必为高电平,因而从TLP250输出-5V,同时关断了Q2、Q4、Q6三只 IGBT,即切断子主电路。当Uf 3.2 运行时的逻辑保护电路 为防止单片机系统受环境干扰或执行程序时出错,在单片机输出端加了一个逻辑保护电路,其电路如图5所示。假定起动电流不超过最大电流,则输入C不起任何作用,输出只受P10~P15控制。按照所设计的桥式电路,要求Q1与Q4、Q2与Q5、Q3与Q6不能同时导通,否则通过IGBT的电流过大,导致过流损坏。根据电路的逻辑关系,当P10P13、P11P14、P12P15出错,都输出低电平,或者P0口输出均为低电平(高电平),Q1Q4、Q2Q5、 Q3Q6没有同时导通,很好地保护了电路。
《基于双单片机通信的无刷直流电动机控制系统的设计》相关文章
- › 基于双单片机的悬挂物体寻迹控制系统--速度传感器与控制技术
- › 基于双单片机通信的无刷直流电动机控制系统的设计
- 在百度中搜索相关文章:基于双单片机通信的无刷直流电动机控制系统的设计
- 在谷歌中搜索相关文章:基于双单片机通信的无刷直流电动机控制系统的设计
- 在soso中搜索相关文章:基于双单片机通信的无刷直流电动机控制系统的设计
- 在搜狗中搜索相关文章:基于双单片机通信的无刷直流电动机控制系统的设计