


 当前位置:
当前位置:基于单片机控制的电子节气门的研究与实践
[09-12 16:03:44] 来源:http://www.88dzw.com 单片机学习 阅读:8363次
文章摘要:3 控制系统软件设计3.1上位机软件设计为了便于系统运行和检查调节效果,采用上位机软件进行辅助控制。之所以选择Matlab 7.0做GUI控制,主要是因为Matlab强大的技术支持平台,其信号处理功能和图形效果的优越性是VC#或VB 6.O等目前常用的上位机软件无法替代的。本系统GUI主要功能包括:模式选择、系统运行、过流和握手应答显示等,上位机软件界面如图5所示。介绍如下:系统上位机和下位机采用串行异步方式,通信协议如下:波特率9 600 b/s,起始位1位,停止位1位,无校验位。串口数据的读取,采用查询方式,读取串口数据,柔用连续接收数据(continuous)的缺省方式,因而下位机返回的
基于单片机控制的电子节气门的研究与实践,标签:单片机开发,单片机原理,单片机教程,http://www.88dzw.com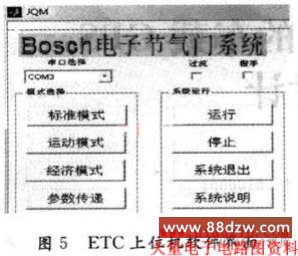
3 控制系统软件设计
3.1上位机软件设计
为了便于系统运行和检查调节效果,采用上位机软件进行辅助控制。之所以选择Matlab 7.0做GUI控制,主要是因为Matlab强大的技术支持平台,其信号处理功能和图形效果的优越性是VC#或VB 6.O等目前常用的上位机软件无法替代的。本系统GUI主要功能包括:模式选择、系统运行、过流和握手应答显示等,上位机软件界面如图5所示。
介绍如下:
系统上位机和下位机采用串行异步方式,通信协议如下:波特率9 600 b/s,起始位1位,停止位1位,无校验位。串口数据的读取,采用查询方式,读取串口数据,柔用连续接收数据(continuous)的缺省方式,因而下位机返回的数据自动地存入输入缓冲区中。
软件串口初始化设置如下:
用户可根据需要,选择串口。设计上,采用弹出框形式,其回调函数为:
参数设置好后,用户通过“参数传递”按钮,向下位机传递运行模式等相关运行参数。得到响应后,用户再通过运行按钮启动系统。在设计中,为了实现交互式的输入,在调用set和get等回调函数时,还应特别注意数据类型的转换,否则,就无法实现交互式的操作。
3.2 下位机软件设计
单片机软件系统采用CodeVersionAVR环境编程,程序由前、后台程序构成。前台程序包括系统初始化程序和循环检测程序。后台程序则包括软件定时器中断程序、串口中断接收子程序与串口中断发送程序,过流保护外中断程序。
初始化程序主要包括单片机I/O口初始化、两路A/D转换的初始化(脚踏板传感器A/D转换初始化和节气门开度传感器A/D转换A/D初始化)、串口通信初始化以及单片机PWM端口的初始化等。系统初始化完成后,就等待中断,以完成中断子程序的处理。
对于软件定时器,采用的是8位T/CO的CTC模式,定时时间设置为20 ms。单片机需完成脚踏板和节气门位置信号的读取及A/D转换、模糊控制算法的实现,以及单片机PWM信号的输出等功能。软件定时中断程序的流程图如图6所示。

驱动电路的PWM的输出,使用的是单片机引脚PD3的第二功能OCl,采用的是相位修正PWM模式。程序设计时,通过改变输入捕捉寄存器ICRl中的值来改变PWM的频率,改变OCRlA输出比较寄存器的值,以改变PWM的占空比。我们发现,电机的脉宽调制频率对电机有很大影响。频率过低则电机颤振幅度偏大,不符合电子节气门的高精度控制要求;频率过高则电机会产生刺耳的蜂鸣声。通过不断调试,发现,电机的脉宽调制频率为1 200 Hz左右效果最好。
ETC系统试验台实物图如图7所示。

4 结语
电子节气门系统是一个复杂的非线性系统,非线性因素的存在将影响系统的控制精度和响应特性。本系统采用模糊参数自整定控制策略,实现了对电子节气门的精确控制。节气门控制过程中无抖动,中间位置时无振荡,而且打开和关闭节气门过程中,节气门运动得十分平滑,从而达到了预期的目的。
《基于单片机控制的电子节气门的研究与实践》相关文章
- › 基于单片机的直接数字频率合成器的设计
- › 基于单片机P89C61X2的FPGA配置
- › 基于单片机的直流调速系统设计
- › 基于单片机仿真器的设计
- › 基于单片机和DSP的被动声目标探测平台设计
- › 基于单片机的电子导游系统设计
- 在百度中搜索相关文章:基于单片机控制的电子节气门的研究与实践
- 在谷歌中搜索相关文章:基于单片机控制的电子节气门的研究与实践
- 在soso中搜索相关文章:基于单片机控制的电子节气门的研究与实践
- 在搜狗中搜索相关文章:基于单片机控制的电子节气门的研究与实践