


 当前位置:
当前位置:直流无刷电动机原理与控制
[09-08 11:44:02] 来源:http://www.88dzw.com 电路基础 阅读:8617次
文章摘要:这样,随着位置传感器转子扇形片的转动,定子绕组在位置传感器VP1、VP2、VP3的控制下,便一相一相地依次馈电,实现了各相绕组电流的换相。在换相过程中,定子各相绕组在工作气隙内所形成的旋转磁场是跳跃式的。这种旋转磁场在360度电角度范围内有三种磁状态,每种磁状态持续120度电角度。各相绕组电流与电动机转子磁场的相互关系如图3所示。图3a)为第一种状态,Fa为绕组A-A’通电后所产生的磁动势。显然,绕组电流与转子磁场的相互作用,使转子沿顺时针方向旋转;转过120度电角度后,便进入第二状态,这时绕组A-A’断电,而B-B’随之通电,即定子绕组所产生的磁场转过了1
直流无刷电动机原理与控制,标签:电子电路基础,http://www.88dzw.com这样,随着位置传感器转子扇形片的转动,定子绕组在位置传感器VP1、VP2、VP3的控制下,便一相一相地依次馈电,实现了各相绕组电流的换相。在换相过程中,定子各相绕组在工作气隙内所形成的旋转磁场是跳跃式的。这种旋转磁场在360度电角度范围内有三种磁状态,每种磁状态持续120度电角度。各相绕组电流与电动机转子磁场的相互关系如图3所示。图3a)为第一种状态,Fa为绕组A-A’通电后所产生的磁动势。显然,绕组电流与转子磁场的相互作用,使转子沿顺时针方向旋转;转过120度电角度后,便进入第二状态,这时绕组A-A’断电,而B-B’随之通电,即定子绕组所产生的磁场转过了120度,如图3 b)所示,电动机定子继续沿顺时针方向旋转;再转120度电角度,便进入第三状态,这时绕组B-B’断电,C-C’通电,定子绕组所产生的磁场又转过了120度电角度,如图3 c)所示;它继续驱动转子沿顺时针方向转过120度电角度后就恢复到初始状态。图4示出了各相绕组的导通顺序的示意图。
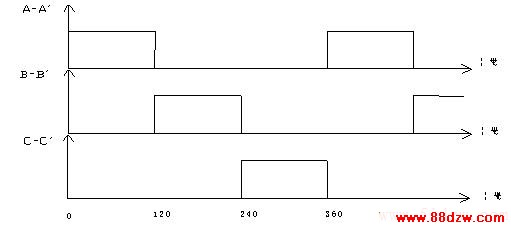
图4 各相绕组的导通示意图
位置传感器
位置传感器在直流无刷电动机中起着测定转子磁极位置的作用,为逻辑开关电路提供正确的换相信息,即将转子磁钢磁极的位置信号转换成电信号,然后去控制定子绕组换相。位置传感器种类较多,且各具特点。在直流无刷电动机中常见的位置传感器有以下几种:电磁式位置传感器、光电式位置传感器、磁敏式位置接近传感器。
电磁式位置传感器在直流无刷电动机中,用得较多的是开口变压器。用于三相直流无刷电动机的开口变压器由定子和跟踪转子两部分组成。定子一般有六个极,它们之间的间隔分别为60度,其中三个极上绕一次绕组,并相互串联后通以高频电源,另外三个极分别绕上二次绕组WA、WB、WC。它们之间分别相隔120度。跟踪转子是一个用非导磁材料做成的圆柱体,并在它上面镶一块120度的扇形导磁材料。在安装时将它与电动机转轴相联,其位置对应于某一磁极。一次绕组所产生的高频磁通通过跟踪转子上的到此材料耦合到二次绕组上,故在二次绕组上产生感应电压,而另外两相二次绕组由于无耦合回路同一次绕组相联,其感应电压基本为零。随着电动机转子的转动,扇形片也跟着旋转,使之离开当前耦合一次绕组而向下一个一次绕组靠近。就这样,随着电动机转子运动,在开口变压器二次绕组上分别感应出电压。扇形导磁片的角度一般略大于120度电角度,常采用130度电角度左右。在三相全控电路中,为了换相译码器的需要,扇形导磁片的角度为180度电角度。同时,扇形导磁片的个数应同直流无刷电动机的极对数相等。
接近开关式位置传感器主要由谐振电路及扇形金属转子两部分组成,当扇形金属转子接近震 荡回路电感L时,使该电路的Q值下降,导致电路正反馈不足而停振,故输出为零。扇形金属转子离开电感元件L时,电路的Q值开始上升,电路又重新起振,输出高频调制信号,经二极管检波后,取出有用控制信号,去控制逻辑开关电路,以保证电动机正确换向。
光电式位置传感器前面已经讲过,是利用光电效应制成的,由跟随电动机转子一起旋转的遮光板和固定不动的光源及光电管等部件组成。
磁敏式位置传感器是指它的某些电参数按一定规律随周围磁场变化的半导体敏感元件。其基本原理为霍尔效应和磁阻效应。常见的磁敏传感器有霍尔元件或霍尔集成电路、磁敏电阻器及磁敏二极管等多种。
研究结果表明,在半导体薄片上产生的霍尔电动势E可用下式表示:
Tag:电路基础,电子电路基础,维修教程知识 - 电路基础
- 上一篇:电压比较器工作原理及应用
《直流无刷电动机原理与控制》相关文章
- › 直流无刷电动机原理与控制
- 在百度中搜索相关文章:直流无刷电动机原理与控制
- 在谷歌中搜索相关文章:直流无刷电动机原理与控制
- 在soso中搜索相关文章:直流无刷电动机原理与控制
- 在搜狗中搜索相关文章:直流无刷电动机原理与控制
编辑推荐
- ・ 场效应管特点
- ・ 三端稳压器IC输出电压公式和用法
- ・ 高速PCB设计指南之五
- ・ 锁相放大器原理
- ・ CMOS电路使用时需要注意的事项
- ・ 开关电源各功能电路详解
最新更新
- ・ LED背光/照明驱动IC系列
- ・ 白光LED资料
- ・ 什么叫做流明、光通量、勒克新
- ・ mcd、流明瓦、照度的解释
- ・ 磁珠的特性及应用
- ・ 驻波比常识
- ・ 电感器的基础知识
- ・ 高速PCB设计指南之一
- ・ 高速PCB设计指南之二
- ・ 高速PCB设计指南之三
热门排行
- ・ 场效应管特点
- ・ 三端稳压器IC输出电压公式和用法
- ・ 高速PCB设计指南之五
- ・ 锁相放大器原理
- ・ CMOS电路使用时需要注意的事项
- ・ 开关电源各功能电路详解
- ・ 瞬态干扰抑制器
- ・ 导线截面积与电流的关系
- ・ 白光LED资料
- ・ 自学电子技术的几个“要”