


 当前位置:
当前位置:背景模型实现车辆检测设计
[09-08 11:42:25] 来源:http://www.88dzw.com 其它电路 阅读:8474次
文章摘要:(5)对视频流各帧所有像素点重复步骤(1)~(4)。2.2 背景模型更新经过上述几个步骤,得到能自适应光强度变化的背景模型。但在车辆拥挤、临时停车或者车辆运动缓慢的情况下,背景模型容易出错,导致车辆检测准确性降低。为了在复杂交通状况下也能得到理想的背景模型,论文在传统σ-δ背景更新方法基础上提出了一个是否更新背景模型的判断尺度。 www.88dzw.com3 运动目标提取在获得重建的背景之后,可以根据当前图像和背景图像的差值求得运动目标。背景差图像为D(x,y)=I(x,y)-B(x,y)。图像中所有低于这一阈值的像素集将被定义为背景, 而高于这一阈值的像素集定义为运
背景模型实现车辆检测设计,标签:电路设计,http://www.88dzw.com(5)对视频流各帧所有像素点重复步骤(1)~(4)。
2.2 背景模型更新
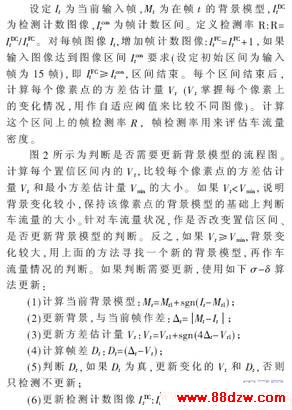
经过上述几个步骤,得到能自适应光强度变化的背景模型。但在车辆拥挤、临时停车或者车辆运动缓慢的情况下,背景模型容易出错,导致车辆检测准确性降低。为了在复杂交通状况下也能得到理想的背景模型,论文在传统σ-δ背景更新方法基础上提出了一个是否更新背景模型的判断尺度。

3 运动目标提取
在获得重建的背景之后,可以根据当前图像和背景图像的差值求得运动目标。背景差图像为D(x,y)=I(x,y)-B(x,y)。图像中所有低于这一阈值的像素集将被定义为背景, 而高于这一阈值的像素集定义为运动目标。采用归一化的方法,即低于阈值的赋0值, 高于阈值的赋1值。不论以何种方式选取阈值, 取单阈值分割后的图像可定义为:

阈值分割法是一种基于区域的图像分割技术,其基本原理是:通过设定不同的特征阈值,把图像象素点分为若干类。常用的特征包括:直接来自原始图像的灰度或彩色特征;由原始灰度或彩色值变换得到的特征。设原始图像为f(x,y),按照一定的准则f(x,y)中找到特征值T,将图像分割为两个部分,分割后的图像为:若取:b0=0(黑),b1=1(白),即为我们通常所说的图像二值化。
本文选取基于最大方差理论的大津法作为视频车辆检测中阈值分割的处理算法。取阈值将物体从背景中分离出来,实际上就是将图像中的所有像素分为2组,或属于物体像素,或属于背景像素。由概率论中的理论得知,若使待分割的2组数据方差最大,则得到2组数据的错分概率最小。
经过阈值分割已经能够成功地分割出运动车辆。大津法分割得到的二值图像仍然在车辆内部存在黑色像素点的问题。为了使检测到的运动目标完整而连续,对背景帧差法得到的二值图像进行形态学膨胀与腐蚀。实验证明,经过三次膨胀与腐蚀之后的图像,可以基本填补运动目标的空洞。
4 实验结果
本文以智能交通中车辆自动监视系统为应用背景,通过实验证明提出方法的正确性。使用固定在三脚架上的摄像机在室外摄取不同场景的视频进行实验。实验平台为PC机Matlab7.0仿真。
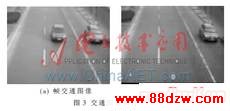
图3为自适应背景模型的提取。选取特殊的临时停车情况,本文提出的算法能够自适应提取出背景模型。本文提出的算法在第621帧时能够得到理想的背景模型,如图3所示;而利用高斯分布提取背景模型的方法则在1 460帧时才能获得如图所示的理想的背景模型。所以该算法比传统的算法在计算速度上有所提高,能够实时性地检测出运动车辆。
《背景模型实现车辆检测设计》相关文章
- › 背景模型实现车辆检测设计
- 在百度中搜索相关文章:背景模型实现车辆检测设计
- 在谷歌中搜索相关文章:背景模型实现车辆检测设计
- 在soso中搜索相关文章:背景模型实现车辆检测设计
- 在搜狗中搜索相关文章:背景模型实现车辆检测设计