


 当前位置:
当前位置:基于ARM的定时继电器驱动模板的设计
[11-20 15:54:22] 来源:http://www.88dzw.com arm嵌入式 阅读:8153次
文章摘要:由于TQ2-L-24V继电器触点的驱动能力不够,不能直接驱动现场执行机构操作,中间继电器(至少3对触点)的体积太大,安装不到电路板上。为此,中间继电器安装在机柜内,与板上的继电器触点构成控制回路,驱动现场执行机构操作。根据用户需求,一块C板可以实现对4/8个现场对象进行合分操作。控制4个对象合分操作时,OBJ1~4的输出触点并联,再与CA、CE的触点串联驱动4个合操作中间继电器;0BJ5~8的输出触点并联,再与0A、0E的触点串联驱动4个分操作中间继电器。控制8个对象合分操作时,需要驱动19个中间继电器构成控制回路,控制回路与中间继电器触点输出连接如图5所示。进行电力系统断路器分闸操作时,还需
基于ARM的定时继电器驱动模板的设计,标签:arm嵌入式系统,arm系统,http://www.88dzw.com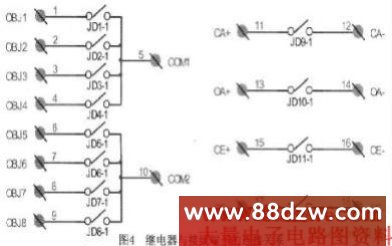
由于TQ2-L-24V继电器触点的驱动能力不够,不能直接驱动现场执行机构操作,中间继电器(至少3对触点)的体积太大,安装不到电路板上。为此,中间继电器安装在机柜内,与板上的继电器触点构成控制回路,驱动现场执行机构操作。
根据用户需求,一块C板可以实现对4/8个现场对象进行合分操作。控制4个对象合分操作时,OBJ1~4的输出触点并联,再与CA、CE的触点串联驱动4个合操作中间继电器;0BJ5~8的输出触点并联,再与0A、0E的触点串联驱动4个分操作中间继电器。控制8个对象合分操作时,需要驱动19个中间继电器构成控制回路,控制回路与中间继电器触点输出连接如图5所示。
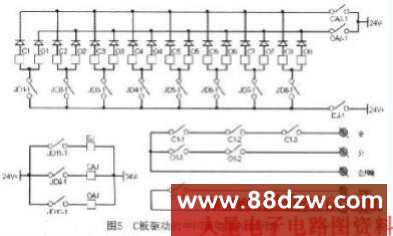
进行电力系统断路器分闸操作时,还需要设计专门的重合闸放电回路,避免分闸操作之后,重合闸机构再将断路器合上。
1.3 安全措施设计
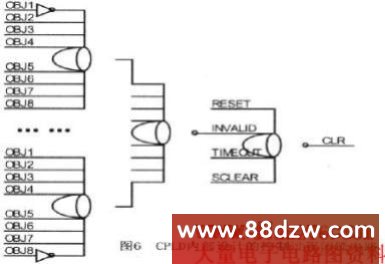
安全、稳定、可靠是对C板设计提出的最重要的要求,模板设计时需要采取一系列的安全措施防止装置受到干扰后误出口造成事故。首先,按照规程的要求设计三个继电器串联、分步操作驱动中间继电器动作,减少受干扰误出口的概率,如图4、5所示。其次,根据EMS/SCADA系统遥控操作的特点,严格控制每次只允许1个通道控制输出。为了防止模板受干扰出现多个对象同时选中的情况,CPUD内部设计有电路自动检测74LS273的8个输出状态,如果出现多于一个状态为高电平,则产生cIJR信号将74LS273的输出状态清除,禁止74LS273对继电器操作。模板复位时,也产生CLR信号清除74LS273的状态,防止系统启动时74LS273的状态不确定,造成误出口。第三,板上12个继电器都通过辅助触点设计有状态返校(RC)电路,如图3所示。CPU通过CPLD内部设计的状态缓存器可以读取继电器的工作状态,一旦检测到继电器工作状态不正确,立即执行软件清除指令,将74LS273的状态清零,并返回执行出错指示。第四,根据控制操作执行的时序规定,采用741LS123设计了控制过程时间限定电路,从控制对象选择开始计时,如果在规定时间之内控制过程还没有完成执行过程,硬件自动撤消本次执行操作,即便软件“走死”时也能自动执行闭锁操作。与此同时,软件设计的定时器也监视着遥控执行过程,一旦通信超时,遥控执行确认命令没有收到,立即执行软件清除指令,取消本次操作。CPLD内部设计的控制过程闭锁电路如图6所示。第五,M板在执行主站下达的遥控命令时,也会自动检测控制对象的工作状态,如果检测到主站命令非法,也将拒绝执行命令。
在采取上述安全措施之后,模板上的定时继电器输出过程通道的安全性可以做到万无一失了。作者近18年远动终端(RTU)的设计与工程实践经验表明,上述安全措施的可靠性非常高,至今没有出现遥控误出口的情况。
2 软件设计
模板软件采用μC/OS―II作为操作系统,软件的层次结构如图7所示。模板的应用软件设计主要工作包括目标板底层驱动程序的编写和模板I/O功能的设计编程两部分工作。

目标板底层驱动主要包括两个异步串口中断的中断服务程序的编写,分别完成与M板报文通信和与PC机VTl00超级终端仿真软件的通信。
《基于ARM的定时继电器驱动模板的设计》相关文章
- › 基于ARM+FPGA的重构控制器设计
- › 基于ARM的FPGA加载配置实现
- › 基于ARM7+μC/OSII的数据采集系统设计
- › 基于ARM的信号发生器人机交互系统设计
- › 基于ARM嵌入式系统的ISP设计
- › 基于ARM微处理器的uC/OS的移植设计
- 在百度中搜索相关文章:基于ARM的定时继电器驱动模板的设计
- 在谷歌中搜索相关文章:基于ARM的定时继电器驱动模板的设计
- 在soso中搜索相关文章:基于ARM的定时继电器驱动模板的设计
- 在搜狗中搜索相关文章:基于ARM的定时继电器驱动模板的设计